M5StickCのIR出力が2m程度しか届かないのでIR送受信モジュールを作ってみた。IR-LEDに約90mA流れるようにしてみたところ4.5m程度まで届くようになった。こんなもんで十分かな...
おまけにmacsbugさんのStart Adapter機能も付けといた。
【回路図】
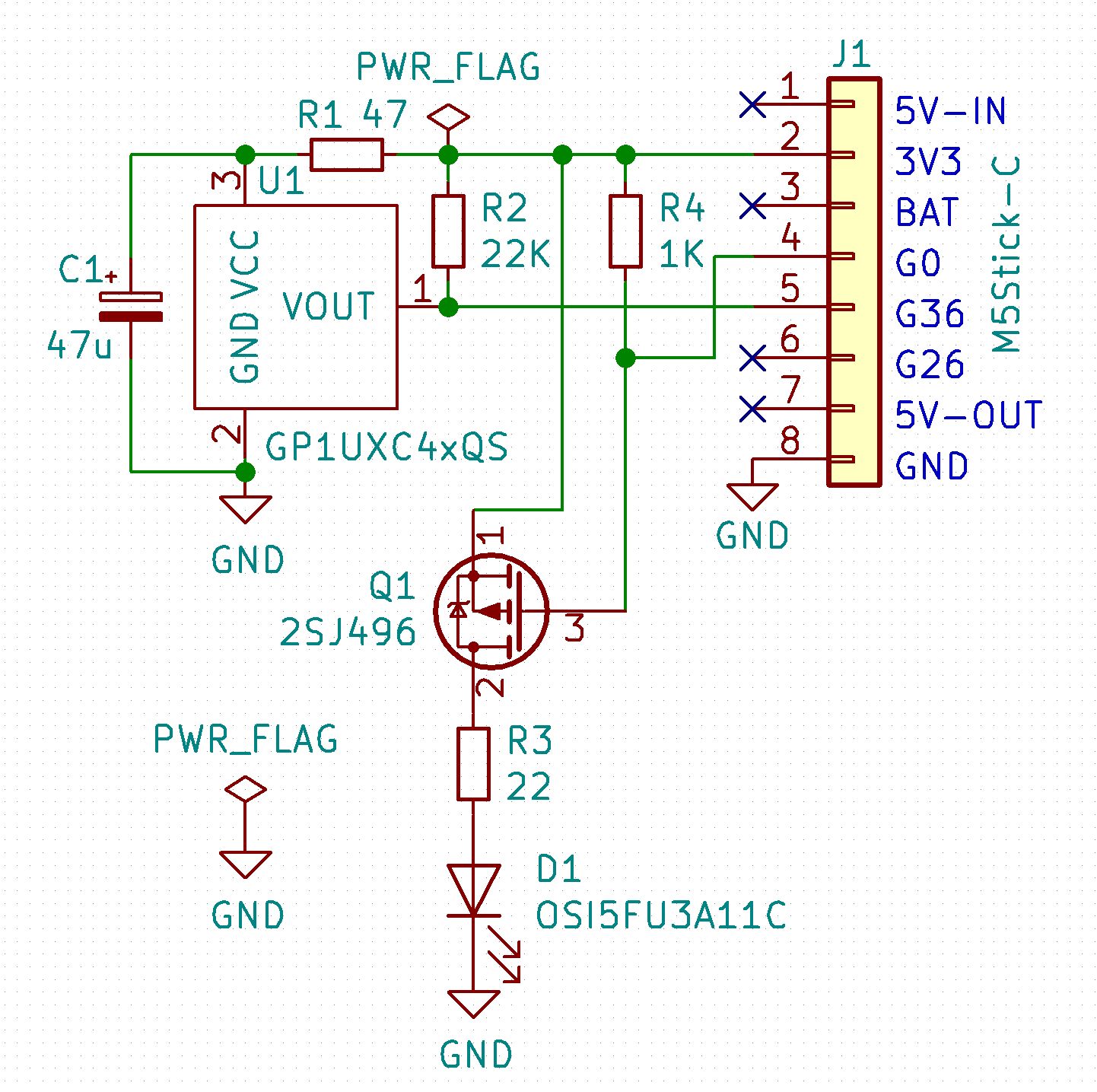
【IR送受信モジュール】


What Shall I Do Next ?
M5StickCのIR出力が2m程度しか届かないのでIR送受信モジュールを作ってみた。IR-LEDに約90mA流れるようにしてみたところ4.5m程度まで届くようになった。こんなもんで十分かな...
おまけにmacsbugさんのStart Adapter機能も付けといた。
【回路図】
【IR送受信モジュール】