
Last Updated on 2020-08-02 by researcher
マックスシリーズ?第2弾はSPIライブラリだ。HWとは比べ物にならないがSW実装としては最速だと思う。
ライト&リード動作の場合はビット当たり6サイクルかかるので16MHzクロックなら最大2.67Mbpsとなるがライトとリードを分離した実装であればビット当たり4サイクルまで高速化できるので16MHzクロックなら最大4Mbpsとなる。なお、F_CPU/6(16MHzなら2.67Mbps)を超える速度を指定した場合、write()/read()は実速度とは合わなくなることに注意してほしい。例えば、16MHzクロックで8Mbpsを指定した場合の実速度は4Mbpsであるが幅の狭いほうのパルスだけ見れば8MbpsであるのでSPIスレーブ側は8Mbps以上の転送速度に対応している必要があるということになる。F_CPU/2を指定したときに最大速度となる。
【仕様】
・速度 16MHz 10.4Kbps – 4Mbps(write/read), 2.67Mbps(transfer)
・マスターモード
・mode-0/1/2/3
・8-bit
・MSB-FIRST
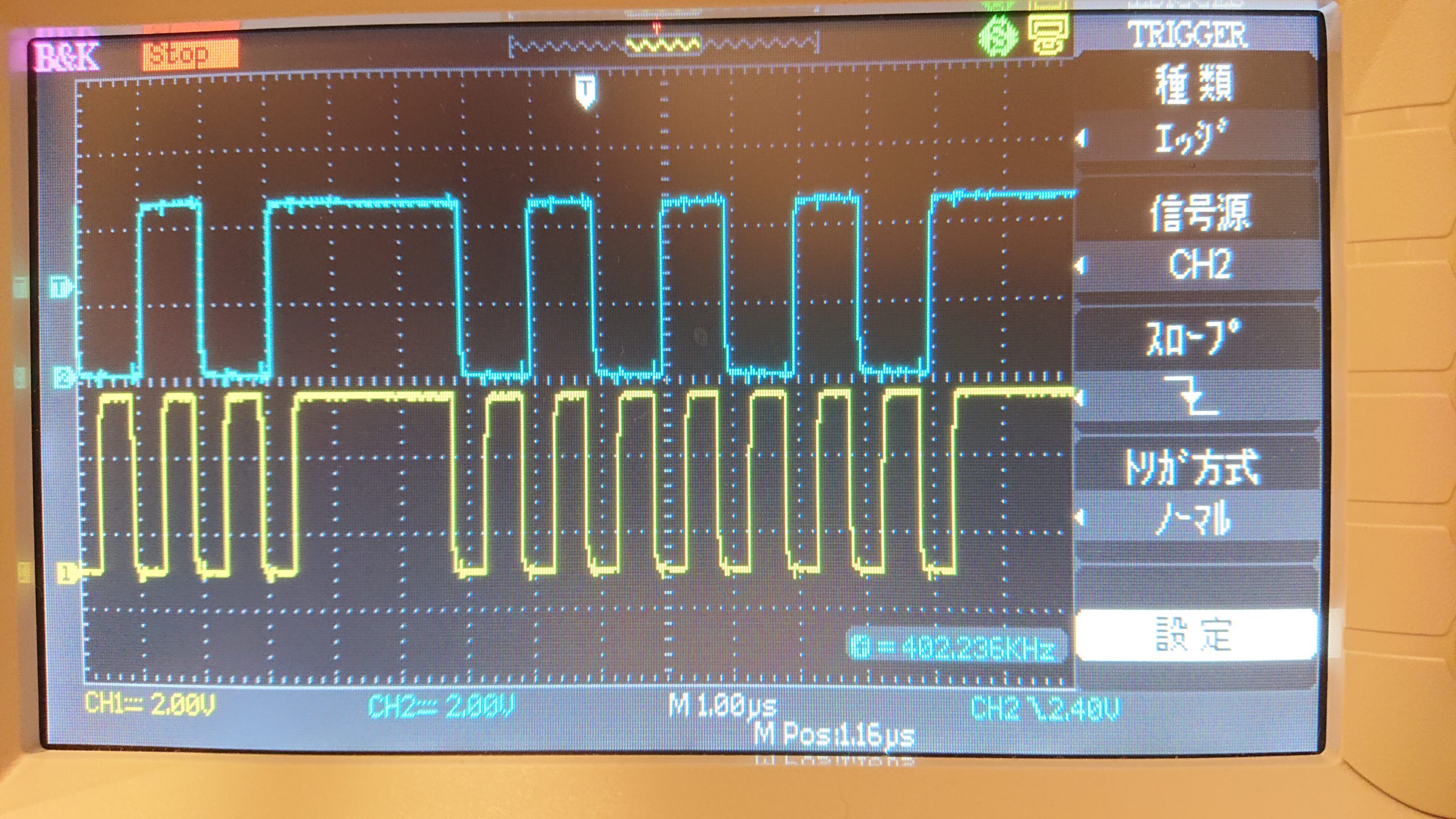
【1Mbpsの波形】
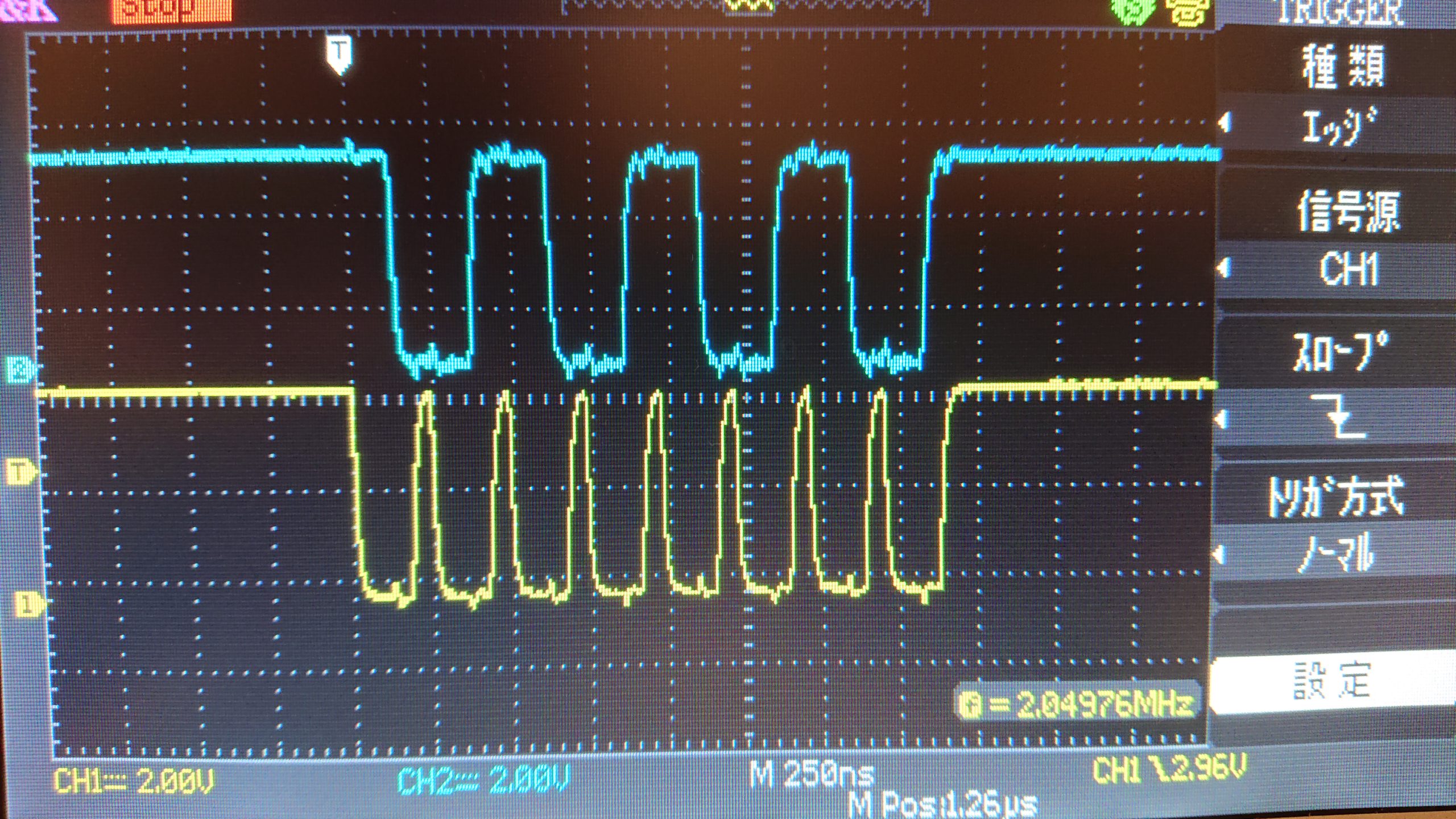
【約4Mbpsの波形(16.5MHzクロックでの最大速度)】
【概要】
|
1 |
void begin(void) |
ライブラリを初期化する。
|
1 |
oid end(void) |
ライブラリを終了する。
|
1 |
uint8_t transfer(uint8_t data) |
1バイトを送受信する。(6サイクル)
|
1 |
void transfer(uint8_t *buf, uint8_t len) |
複数バイトを送受信する。
|
1 |
void write(uint8_t data) |
1バイトを送信する。(4サイクル)
|
1 |
void write(uint8_t *buf, uint8_t len) |
複数バイトを送信する。
|
1 |
uint8_t read(void) |
1バイトを受信する。(4サイクル)
|
1 |
void read(uint8_t *buf, uint8_t len) |
複数バイトを受信する。
【サンプル・スケッチ】
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 |
#include "maxspi.h" #define SPI_MISO IOPORT_PIN('B', 0) #define SPI_MOSI IOPORT_PIN('B', 1) #define SPI_SCLK IOPORT_PIN('B', 2) #define SPI_CS IOPORT_PIN('B', 3) #define MAXSPI MaxSPI<MAXSPI_MODE3, 1000000, SPI_MISO, SPI_MOSI, SPI_SCLK> void setup(void) { IOPORT::digitalWrite(SPI_CS, HIGH); IOPORT::pinMode(SPI_CS, OUTPUT); MAXSPI::begin(); } void loop(void) { IOPORT::digitalWrite(SPI_CS, LOW); MAXSPI::transfer('A'); IOPORT::digitalWrite(SPI_CS, HIGH); } |
【修正履歴】
2020-07-31
かなりバグってたっぽいので修正ついでにテンプレート・パラメタにSPIモードを追加し全MODE対応してみた。
2020-07-15
同じコードが生成されるので問題ないがMISO入力に対して正しくないポートマクロ名を指定していたので修正。
2020-07-10
インラインアセンブラの入出力パラメタの使い方が正しくなかったので修正。
【ライブラリ】
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 |
/* maxspi.h - High Speed SPI Library for AVR Series Speed: 16MHz 10.4K - 4M bps (2.6M bps) Exsample: #include "maxspi.h" #define SPI_MISO IOPORT_PIN('B', 0) #define SPI_MOSI IOPORT_PIN('B', 1) #define SPI_SCLK IOPORT_PIN('B', 2) #define SPI_CS IOPORT_PIN('B', 3) #define MAXSPI MaxSpi<MAXSPI_MODE3, 1000000, SPI_MISO, SPI_MOSI, SPI_SCLK> void setup(void) { IOPORT::digitalWrite(SPI_CS, HIGH); IOPORT::pinMode(SPI_CS, OUTPUT); MAXSPI::begin(); } void loop(void) { IOPORT::digitalWrite(SPI_CS, LOW); MAXSPI::transfer('A'); IOPORT::digitalWrite(SPI_CS, HIGH); } Copyright (c) 2020 Sasapea's Lab. All right reserved. This library is free software; you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation; either version 2.1 of the License, or (at your option) any later version. This library is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details. You should have received a copy of the GNU Lesser General Public License along with this library; if not, write to the Free Software Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA */ #ifndef __MAXSPI_H #define __MAXSPI_H #include "ioport.h" #define MAXSPI_CPOL 1 #define MAXSPI_CPHA 2 typedef enum { MAXSPI_MODE0 = 0, // CPOL = 0, CPHA = 0 MAXSPI_MODE1 = MAXSPI_CPHA, // CPOL = 0, CPHA = 1 MAXSPI_MODE2 = MAXSPI_CPOL | MAXSPI_CPHA, // CPOL = 1, CPHA = 1 MAXSPI_MODE3 = MAXSPI_CPOL, // CPOL = 1, CPHA = 0 } MAXSPI_MODE; #define MAXSPI_DELAY_CYCLE 3 // cycle of delay loop #define MAXSPI_CLOCK_CYCLE 3 // cycle of bit assembly #define MAXSPI_CLOCK_CYCLE ((float)F_CPU / SPEED / 2) #define MAXSPI_SWCLK_CYCLE (int)(MAXSPI_CLOCK_CYCLE + 0.5) #define MAXSPI_DELAY(n, c) \ do \ { \ int cycle = 0; \ float error = MAXSPI_CLOCK_CYCLE - MAXSPI_SWCLK_CYCLE; \ float round = (error < 0 ? -0.5 : 0.5); \ error -= (int)error; \ if (((int)(error * (n) + round) ^ (int)(error * ((n) + 1) + round)) & 1) \ cycle += (error < 0 ? -1 : 1); \ if ((cycle += MAXSPI_SWCLK_CYCLE - (c)) > 0) \ { \ if (cycle / MAXSPI_DELAY_CYCLE) \ __asm__ volatile \ ( \ "ldi r22, %[_COUNT_]" "\n\t" \ "1: dec r22" "\n\t" \ "brne 1b" "\n\t" \ : \ : [_COUNT_] "M" (cycle / MAXSPI_DELAY_CYCLE) \ : "r22" \ ); \ if ((cycle % MAXSPI_DELAY_CYCLE) > 0) \ __asm__ volatile ("nop"); \ if ((cycle % MAXSPI_DELAY_CYCLE) > 1) \ __asm__ volatile ("nop"); \ } \ } \ while (0) #define MAXSPI_SHIFT(no, bit) \ do \ { \ __asm__ volatile \ ( \ "out %[_SCLK_], r25" "\n\t" \ "sbrc r23, %[_BPOS_]" "\n\t" \ "out %[_MOSI_], r26" "\n\t" \ : \ : [_SCLK_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(SCLK))) \ , [_MOSI_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(MOSI))) \ , [_BPOS_] "I" (bit) \ ); \ MAXSPI_DELAY(no, MAXSPI_CLOCK_CYCLE); \ } \ while (0) #define MAXSPI_LATCH(no, bit) \ do \ { \ __asm__ volatile \ ( \ "out %[_SCLK_], r25" "\n\t" \ "sbic %[_MISO_], %[_POSI_]" "\n\t" \ "ori %[_DATA_], 1 << %[_BPOS_]" "\n\t" \ : [_DATA_] "=r" (data) \ : [_SCLK_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(SCLK))) \ , [_MISO_] "I" (_SFR_IO_ADDR(IOPORT_INREG(MISO))) \ , [_POSI_] "I" (IOPORT_PINPOS(MISO)) \ , [_BPOS_] "I" (bit) \ ); \ MAXSPI_DELAY(no, MAXSPI_CLOCK_CYCLE); \ } \ while (0) #define MAXSPI_CLOCK(no) \ do \ { \ __asm__ volatile \ ( \ "out %[_SCLK_], r25" "\n\t" \ : \ : [_SCLK_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(SCLK))) \ ); \ MAXSPI_DELAY(no, 1); \ } \ while (0) template<MAXSPI_MODE MODE, uint32_t SPEED, uint8_t MISO, uint8_t MOSI, uint8_t SCLK> class MaxSpi { public: static void begin(void) { IOPORT::digitalWrite(SCLK, MODE & MAXSPI_CPOL ? HIGH : LOW); IOPORT::pinMode(SCLK, OUTPUT); IOPORT::pinMode(MOSI, OUTPUT); IOPORT::pinMode(MISO, INPUT ); } static void end(void) { IOPORT::pinMode(SCLK, INPUT); IOPORT::pinMode(MOSI, INPUT); } static uint8_t transfer(uint8_t data) { __asm__ volatile ( "mov r23, %[_DATA_]" "\n\t" "clc" "\n\t" "sbic %[_MOSI_], %[_POSO_]" "\n\t" "sec" "\n\t" "ror r23" "\n\t" "eor r23, %[_DATA_]" "\n\t" "clr %[_DATA_]" "\n\t" "ldi r26, 1 << %[_POSO_]" "\n\t" "ldi r25, 1 << %[_POSC_]" "\n\t" : [_DATA_] "=r" (data) : [_MOSI_] "I" (_SFR_IO_ADDR(IOPORT_OUTREG(MOSI))) , [_POSO_] "I" (IOPORT_PINPOS(MOSI)) , [_POSC_] "I" (IOPORT_PINPOS(SCLK)) : "r23", "r25", "r26" ); if (MODE & MAXSPI_CPHA) // CPHA = 1 { if (MODE & MAXSPI_CPOL) MAXSPI_CLOCK(0); else MAXSPI_DELAY(0, 0); MAXSPI_SHIFT( 1, 7); MAXSPI_LATCH( 2, 7); MAXSPI_SHIFT( 3, 6); MAXSPI_LATCH( 4, 6); MAXSPI_SHIFT( 5, 5); MAXSPI_LATCH( 6, 5); MAXSPI_SHIFT( 7, 4); MAXSPI_LATCH( 8, 4); MAXSPI_SHIFT( 9, 3); MAXSPI_LATCH(10, 3); MAXSPI_SHIFT(11, 2); MAXSPI_LATCH(12, 2); MAXSPI_SHIFT(13, 1); MAXSPI_LATCH(14, 1); MAXSPI_SHIFT(15, 0); MAXSPI_LATCH(16, 0); } else // CPHA = 0 { if (MODE & MAXSPI_CPOL) MAXSPI_SHIFT( 0, 7); else { __asm__ volatile ( "sbrc r23, 7" "\n\t" "out %[_MOSI_], r26" "\n\t" : : [_MOSI_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(MOSI))) ); MAXSPI_DELAY(0, 2); } MAXSPI_LATCH( 1, 7); MAXSPI_SHIFT( 2, 6); MAXSPI_LATCH( 3, 6); MAXSPI_SHIFT( 4, 5); MAXSPI_LATCH( 5, 5); MAXSPI_SHIFT( 6, 4); MAXSPI_LATCH( 7, 4); MAXSPI_SHIFT( 8, 3); MAXSPI_LATCH( 9, 3); MAXSPI_SHIFT(10, 2); MAXSPI_LATCH(11, 2); MAXSPI_SHIFT(12, 1); MAXSPI_LATCH(13, 1); MAXSPI_SHIFT(14, 0); MAXSPI_LATCH(15, 0); MAXSPI_CLOCK(16); } if (MODE & MAXSPI_CPOL) MAXSPI_CLOCK(17); else MAXSPI_DELAY(17, 0); return data; } static void transfer(uint8_t *buf, uint8_t len) { while (len--) { *buf = transfer(*buf); buf++; } } static void write(uint8_t data) { __asm__ volatile ( "mov r23, %[_DATA_]" "\n\t" "clc" "\n\t" "sbic %[_MOSI_], %[_POSO_]" "\n\t" "sec" "\n\t" "ror r23" "\n\t" "eor r23, %[_DATA_]" "\n\t" "ldi r26, 1 << %[_POSO_]" "\n\t" "ldi r25, 1 << %[_POSC_]" "\n\t" : [_DATA_] "=r" (data) : [_MOSI_] "I" (_SFR_IO_ADDR(IOPORT_OUTREG(MOSI))) , [_POSO_] "I" (IOPORT_PINPOS(MOSI)) , [_POSC_] "I" (IOPORT_PINPOS(SCLK)) : "r23", "r25", "r26" ); if (MODE & MAXSPI_CPHA) // CPHA = 1 { if (MODE & MAXSPI_CPOL) MAXSPI_CLOCK(0); else MAXSPI_DELAY(0, 0); MAXSPI_SHIFT( 1, 7); MAXSPI_CLOCK( 2); MAXSPI_SHIFT( 3, 6); MAXSPI_CLOCK( 4); MAXSPI_SHIFT( 5, 5); MAXSPI_CLOCK( 6); MAXSPI_SHIFT( 7, 4); MAXSPI_CLOCK( 8); MAXSPI_SHIFT( 9, 3); MAXSPI_CLOCK(10); MAXSPI_SHIFT(11, 2); MAXSPI_CLOCK(12); MAXSPI_SHIFT(13, 1); MAXSPI_CLOCK(14); MAXSPI_SHIFT(15, 0); MAXSPI_CLOCK(16); } else // CPHA = 0 { if (MODE & MAXSPI_CPOL) MAXSPI_SHIFT( 0, 7); else { __asm__ volatile ( "sbrc r23, 7" "\n\t" "out %[_MOSI_], r26" "\n\t" : : [_MOSI_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(MOSI))) ); MAXSPI_DELAY(0, 2); } MAXSPI_CLOCK( 1); MAXSPI_SHIFT( 2, 6); MAXSPI_CLOCK( 3); MAXSPI_SHIFT( 4, 5); MAXSPI_CLOCK( 5); MAXSPI_SHIFT( 6, 4); MAXSPI_CLOCK( 7); MAXSPI_SHIFT( 8, 3); MAXSPI_CLOCK( 9); MAXSPI_SHIFT(10, 2); MAXSPI_CLOCK(11); MAXSPI_SHIFT(12, 1); MAXSPI_CLOCK(13); MAXSPI_SHIFT(14, 0); MAXSPI_CLOCK(15); MAXSPI_CLOCK(16); } if (MODE & MAXSPI_CPOL) MAXSPI_CLOCK(17); else MAXSPI_DELAY(17, 0); } static void write(uint8_t *buf, uint8_t len) { while (len--) write(*buf++); } static uint8_t read(void) { uint8_t data; __asm__ volatile ( "clr %[_DATA_]" "\n\t" "ldi r25, 1 << %[_POSC_]" "\n\t" : [_DATA_] "=r" (data) : [_POSC_] "I" (IOPORT_PINPOS(SCLK)) : "r25" ); if (MODE & MAXSPI_CPOL) MAXSPI_CLOCK(0); else MAXSPI_DELAY(0, 0); if (MODE & MAXSPI_CPHA) // CPHA = 1 { MAXSPI_CLOCK( 1); MAXSPI_LATCH( 2, 7); MAXSPI_CLOCK( 3); MAXSPI_LATCH( 4, 6); MAXSPI_CLOCK( 5); MAXSPI_LATCH( 6, 5); MAXSPI_CLOCK( 7); MAXSPI_LATCH( 8, 4); MAXSPI_CLOCK( 9); MAXSPI_LATCH(10, 3); MAXSPI_CLOCK(11); MAXSPI_LATCH(12, 2); MAXSPI_CLOCK(13); MAXSPI_LATCH(14, 1); MAXSPI_CLOCK(15); MAXSPI_LATCH(16, 0); } else // CPHA = 0 { MAXSPI_LATCH( 1, 7); MAXSPI_CLOCK( 2); MAXSPI_LATCH( 3, 6); MAXSPI_CLOCK( 4); MAXSPI_LATCH( 5, 5); MAXSPI_CLOCK( 6); MAXSPI_LATCH( 7, 4); MAXSPI_CLOCK( 8); MAXSPI_LATCH( 9, 3); MAXSPI_CLOCK(10); MAXSPI_LATCH(11, 2); MAXSPI_CLOCK(12); MAXSPI_LATCH(13, 1); MAXSPI_CLOCK(14); MAXSPI_LATCH(15, 0); MAXSPI_CLOCK(16); } if (MODE & MAXSPI_CPOL) MAXSPI_CLOCK(17); else MAXSPI_DELAY(17, 0); return data; } static void read(uint8_t *buf, uint8_t len) { while (len--) *buf++ = read(); } }; #endif |
【参照ライブラリ】
AVR用高速GPIOライブラリ