TWELITEでスイッチによりディープスリープ&ウェイクアップさせると1uA未満で待機させることができる。が、スイッチがB接点のときのプルアップ抵抗に流れる電流が内部プルアップのときで66uA程度と比較的大きいため電池駆動などで問題になることがある。
スイッチをA接点に変更するか外部プルアップにして抵抗を大きくできれば良いのだがTWELITEのプルアップ抵抗に関しては100K以上で誤動作してしまうようだ。なのでB接点回路の消費電流を可能な限り低くするために回路を考えてみた。
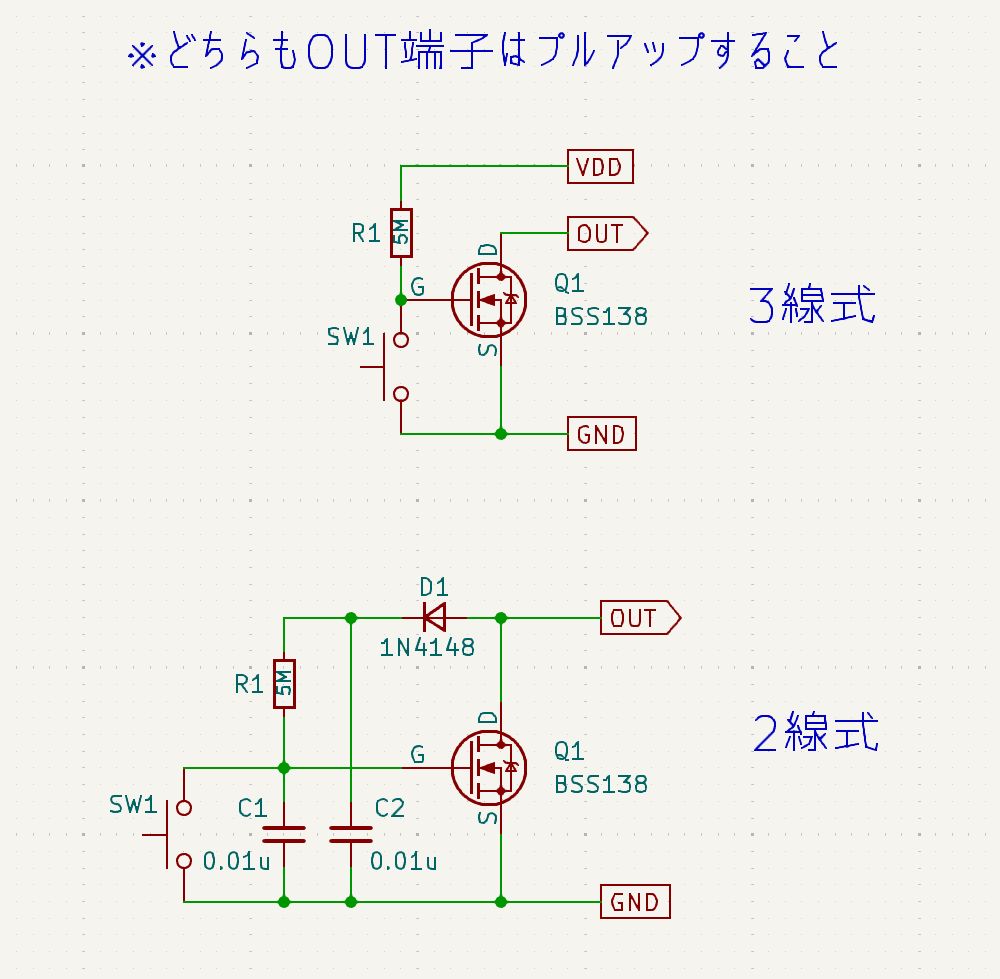
次図の3線式のシンプルな回路で試してみたところ実測値で1uA未満に抑えることができた。
スイッチが押されているオフ状態のときは今まで通りにCPU側のプルアップ電流が流れるが通常の押されていないオン状態ではCPU側のプルアップ抵抗に電流が流れないよう反転回路になっている。
TWELITEに限らず入力インピーダンスが比較的低い全てのCPUに有効なはずなので参考まで。
※2線式のほうは試してないので動くかどうかはわからない。ちなみにC1は必要ないかも...