
Last Updated on 2022-10-08 by researcher
以前に、送信専用ではあるがソフトウェアだけで実現した高速シリアルライブラリを紹介した。
Hi-Speed Serial TX Library for AVR Series
送信ができると受信もやってみたくなる。ただ、ソフトウェアのみによる受信処理にはピン変化割り込みを使うのが一般的であるが高速化という観点ではその割り込みレイテンシーが最高速度を制限してしまう。仮にビット毎に割り込み処理した場合どんなに頑張っても200Kbps程度が限界だろう。より高速化するには割り込みはスタートビット検出時のみとしそのまま一気にビットを組み立てるしかない。ちなみに割り込みではなくポーリング方式ならさらなる高速化を期待できるが他のことが全くできなくなってしまうので現実的ではない。
データシートによるとINTピン変化ラッチに2.5-3.5サイクル(PCINTは+2サイクル?)、割り込み実行に6-8サイクル、ここまでで既に10サイクル前後も必要だ。10サイクルは16MHzクロックで0.625usなので単純に考えると1Mbps程度が受信処理の限界値。但し、適切なタイミングで受信処理が開始できさえすれば、その後はソフトウェア処理でもビット当たり2サイクルで処理できるので全然余裕はある。
残る問題は、割り込み開始処理のレジスタ退避や受信データの保存処理が間に合うかどうかだが、そこはアセンブラでカリカリにチューニングして限界までサイクルカットするしか方法はないがアセンブラだけで作ってしまうと柔軟性に欠けるため、今回も、テンプレートクラスとインライン・アセンブラとの組み合わせで実装してみた。テンプレート・クラスによりアセンブラ・コードを柔軟に生成するための手段であり、ある意味、最強とも言える。
ちなみに1Mbpsでの余裕は0.5usもないので他の割り込みとカチあったりすると簡単に受信データ喪失或いは化けてしまうことに注意してほしい。割り込みを多用する機能(USB/UART/I2C/SPI)と同時利用したりするとかなりの高確率で受信データ喪失或いは化けが発生してしまうはずだ。タイマー割り込みもエラーを引き起こす原因となる可能性があると考えるべきだろう。特にC言語のコールバック関数を呼び出すタイプの割り込み処理はかなり大きなオーバーヘッドがかかるため気を付けなければならない。
受信データ喪失或いは化けはソフトウェア受信処理型の欠点でもあり対策としては通信速度を落とすぐらいのことしかないが通信速度を落とすと今度は割り込み禁止期間が長くなってしまうという弊害がでる。それが他の問題を引き起こすようなら通信速度は落とさずアプリ側にてリトライなどエラー対策を別途検討するしかない。
今のところ、手元にあるATtiny85/ATMega32U4で動作確認しているがATmega328はなぜか持っていないので動作未確認。
【仕様】
・半二重通信(送受信同時処理は出来ない)
・送信は、16MHzクロックで38400-8Mbpsまで。
・受信は、16MHzクロックで38400-1Mbpsまで。
・通信形式は、data 8-bit/none-parity/1-stopbit固定。
・送信ピンは任意のピンに対応。
・受信ピンはMAXUART_RXPIN_XX型を指定。
・割り込みハンドラーは未実装なので受信ピンに対応したMAXUART_RXPIN_XX_ISRマクロによりアプリ側で実装する必要がある。
・INT0/INT1,…PCINT0/PCINT1,…などの割り込みソース毎に一つのピンだけが受信可能。同じ割り込みソースで複数の受信ピンを同時利用することは出来ない。
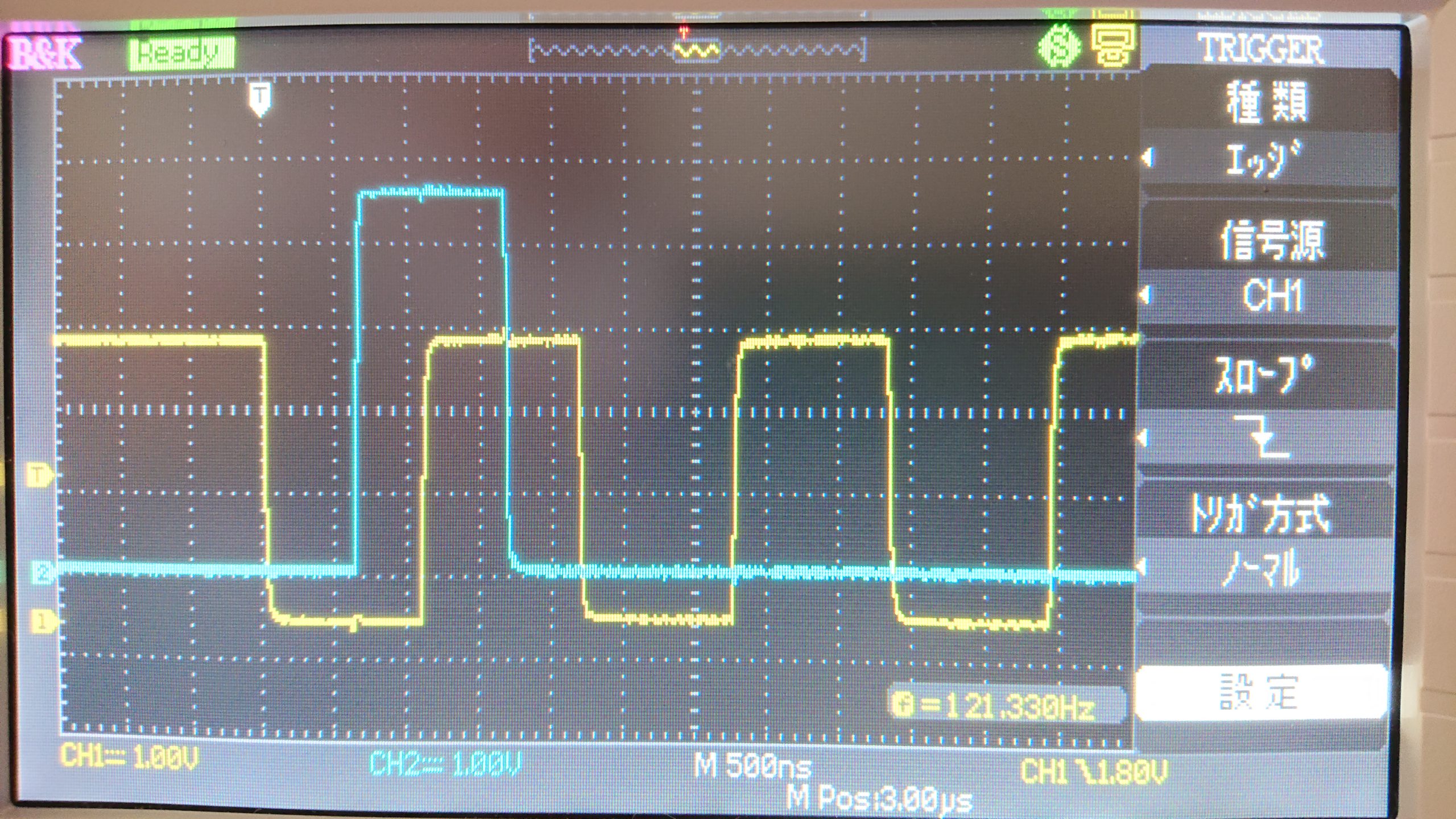
【921600bpsでの受信開始タイミングの確認】
【概要】
|
1 |
bool begin(void) |
ライブラリを開始する。
|
1 |
void end(void) |
ライブラリを終了する。
|
1 |
void clear(void) |
受信バッファをクリアする。
|
1 |
uint8_t available(void) |
受信バッファ内の受信済みバイト数を取得する。
|
1 |
int read(void) |
受信バッファから1バイト読み込む。受信バッファが空の場合は、-1を返す。
|
1 |
uint8_t read(uint8_t *buf, uint8_t len) |
受信バッファから複数バイト読み込む。バッファ(buf)に格納したバイト数を返す。
|
1 |
void receive() |
受信割り込み処理。受信割り込みハンドラーから呼び出される。
|
1 |
void write(uint8_t data) |
1バイトを送信する。
|
1 |
void write(uint8_t *buf, uint8_t len) |
複数バイトを送信する。
【サンプルスケッチ】
PB1を送信ピン、PB2を受信ピンとする例。※Arduinoのピン名とは違うことに注意。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
#include "maxuart.h" #define MAXUART MaxUart<921600, IOPORT_PIN('B', 1), MAXUART_RXPIN_B2> MAXUART_RXPIN_B2_ISR(MAXUART) void setup() { MAXUART::begin(); } void loop(void) { int c = MAXUART::read(); if (c >= 0) MAXUART::write(c); } |
【修正履歴】
2022-10-08
1M未満の速度で受信が誤動作するのを修正。
2020-07-19
ストップビット送信処理を全AVRシリーズ共通コードに変更。
2020-07-10
ライブラリのクラス名とファイル名を変更。インラインアセンブラの入出力パラメタの使い方が正しくなかったので修正。
2020-06-29
受信バッファ・フル時の処理サイクル数の違いにより受信処理自体が誤動作する可能性があったためバッファ状態に関係なく同じサイクル数(厳密には1サイクル違う)で処理できるようデータ保存処理を改良してみた。
2020-06-28
1Mbpsの連続送信データでも安定して受信できるように改良。
2020-06-27
1Mbpsでの連続受信が微妙に間に合っていなかったので改良。割り込み処理からリターンすると間に合わなくなるのでリターンせずに割り込み処理を再実行するようにしてみたがもう少し調整必要な感じ。ちなみに、送信元の最大連続送信バイト数は、このライブラリの受信バッファサイズ(規定値は32バイト)に制限され送信と送信の間には受信処理が間に合うよう間隔をあける必要がある。
また、送信側が複数バイトを連続送信するとき、サンプルスケッチのようなプログラムは全二重通信となりライブラリの送信処理の割り込み禁止が受信処理を妨害してしまうため誤動作することにも注意。
【ライブラリ】
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 606 607 608 609 610 611 612 613 614 615 616 617 618 619 620 621 622 623 624 625 626 627 628 629 630 631 632 633 634 635 636 637 638 639 640 641 642 643 644 645 646 647 648 649 650 651 652 653 654 655 656 657 658 659 660 661 662 663 664 665 666 667 668 669 670 671 672 673 674 675 676 677 678 679 680 681 682 683 684 685 686 687 688 689 690 691 692 693 694 695 696 697 698 699 700 701 702 703 704 705 706 707 708 709 710 711 712 713 714 715 716 717 718 719 720 721 722 723 724 725 726 727 728 729 730 731 732 733 734 735 736 737 738 739 740 741 742 743 744 745 746 747 748 749 750 751 752 753 754 755 756 757 758 759 760 761 762 763 764 765 766 767 768 769 770 771 772 773 774 775 776 777 778 779 780 781 782 783 784 785 786 787 788 789 790 791 792 793 794 795 796 797 798 799 800 801 802 803 804 805 806 807 808 809 810 811 812 813 814 815 816 817 818 819 820 821 822 823 824 825 826 827 828 829 830 831 832 833 834 835 836 837 838 839 840 841 842 843 844 845 846 847 848 849 850 851 852 853 854 855 856 857 858 859 860 861 862 863 864 865 866 867 868 869 870 871 872 873 874 875 876 877 |
/* maxuart.h - High Speed UART Library for AVR Series Baudrate: [16MHz] TX: 38400 - 8M bps RX: 38400 - 1M bps Exsample: #include "maxuart.h" // TX: PB1, RX: PB2 #define MAXUART MaxUart<921600, IOPORT_PIN('B', 1), MAXUART_RXPIN_B2> MAXUART_ISR_PIN_B2(MAXUART) // ISR void setup(void) { MAXUART::begin(); } void loop(void) { int c = MAXUART::read(); if (c >= 0) MAXUART::write(c); } Copyright (c) 2020 Sasapea's Lab. All right reserved. This library is free software; you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation; either version 2.1 of the License, or (at your option) any later version. This library is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details. You should have received a copy of the GNU Lesser General Public License along with this library; if not, write to the Free Software Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA */ #ifndef __MAXUART_H #define __MAXUART_H #include <stdint.h> #include <stdbool.h> #include <avr/io.h> #include <avr/interrupt.h> #include "ioport.h" #if defined(_AVR_IOM328P_H_) || defined(_AVR_IOMX8_H_) #define _ATMEGA328_ #elif defined(__AVR_ATmega32U4__) || defined(__AVR_ATmega16U4__) #define _ATMEGA32U4_ #elif defined(_AVR_IOTNX5_H_) #define _ATTINY85_ #endif #if defined(_ATMEGA328_) typedef enum { MAXUART_RXPIN_B0 = IOPORT_PIN('B', 0), // PCINT0 MAXUART_RXPIN_B1 = IOPORT_PIN('B', 1), // PCINT0 MAXUART_RXPIN_B2 = IOPORT_PIN('B', 2), // PCINT0 MAXUART_RXPIN_B3 = IOPORT_PIN('B', 3), // PCINT0 MAXUART_RXPIN_B4 = IOPORT_PIN('B', 4), // PCINT0 MAXUART_RXPIN_B5 = IOPORT_PIN('B', 5), // PCINT0 MAXUART_RXPIN_B6 = IOPORT_PIN('B', 6), // PCINT0 MAXUART_RXPIN_B7 = IOPORT_PIN('B', 7), // PCINT0 MAXUART_RXPIN_C0 = IOPORT_PIN('C', 0), // PCINT1 MAXUART_RXPIN_C1 = IOPORT_PIN('C', 1), // PCINT1 MAXUART_RXPIN_C2 = IOPORT_PIN('C', 2), // PCINT1 MAXUART_RXPIN_C3 = IOPORT_PIN('C', 3), // PCINT1 MAXUART_RXPIN_C4 = IOPORT_PIN('C', 4), // PCINT1 MAXUART_RXPIN_C5 = IOPORT_PIN('C', 5), // PCINT1 MAXUART_RXPIN_C6 = IOPORT_PIN('C', 6), // PCINT1 MAXUART_RXPIN_D0 = IOPORT_PIN('D', 0), // PCINT2 MAXUART_RXPIN_D1 = IOPORT_PIN('D', 1), // PCINT2 MAXUART_RXPIN_D2 = IOPORT_PIN('D', 2), // INT0 MAXUART_RXPIN_D3 = IOPORT_PIN('D', 3), // INT1 MAXUART_RXPIN_D4 = IOPORT_PIN('D', 4), // PCINT2 MAXUART_RXPIN_D5 = IOPORT_PIN('D', 5), // PCINT2 MAXUART_RXPIN_D6 = IOPORT_PIN('D', 6), // PCINT2 MAXUART_RXPIN_D7 = IOPORT_PIN('D', 7), // PCINT2 MAXUART_RXPIN_DISABLE = 0xFF, } MAXUART_RXPIN; #define MAXUART_RXPIN_B0_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B1_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B2_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B3_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B4_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B5_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B6_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B7_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_Bn_ISR(T) \ ISR(PCINT0_vect, ISR_NAKED) \ { \ T::receive(); \ reti(); \ } #define MAXUART_RXPIN_C0_ISR(T) MAXUART_RXPIN_Cn_ISR(T) #define MAXUART_RXPIN_C1_ISR(T) MAXUART_RXPIN_Cn_ISR(T) #define MAXUART_RXPIN_C2_ISR(T) MAXUART_RXPIN_Cn_ISR(T) #define MAXUART_RXPIN_C3_ISR(T) MAXUART_RXPIN_Cn_ISR(T) #define MAXUART_RXPIN_C4_ISR(T) MAXUART_RXPIN_Cn_ISR(T) #define MAXUART_RXPIN_C5_ISR(T) MAXUART_RXPIN_Cn_ISR(T) #define MAXUART_RXPIN_C6_ISR(T) MAXUART_RXPIN_Cn_ISR(T) #define MAXUART_RXPIN_Cn_ISR(T) \ ISR(PCINT1_vect, ISR_NAKED) \ { \ T::receive(); \ reti(); \ } #define MAXUART_RXPIN_D0_ISR(T) MAXUART_RXPIN_Dn_ISR(T) #define MAXUART_RXPIN_D1_ISR(T) MAXUART_RXPIN_Dn_ISR(T) #define MAXUART_RXPIN_D4_ISR(T) MAXUART_RXPIN_Dn_ISR(T) #define MAXUART_RXPIN_D5_ISR(T) MAXUART_RXPIN_Dn_ISR(T) #define MAXUART_RXPIN_D6_ISR(T) MAXUART_RXPIN_Dn_ISR(T) #define MAXUART_RXPIN_D7_ISR(T) MAXUART_RXPIN_Dn_ISR(T) #define MAXUART_RXPIN_Dn_ISR(T) \ ISR(PCINT2_vect, ISR_NAKED) \ { \ T::receive(); \ reti(); \ } #define MAXUART_RXPIN_D2_ISR(T) \ ISR(INT0_vect, ISR_NAKED) \ { \ T::receive(); \ reti(); \ } #define MAXUART_RXPIN_D3_ISR(T) \ ISR(INT1_vect, ISR_NAKED) \ { \ T::receive(); \ reti(); \ } #elif defined(_ATMEGA32U4_) typedef enum { MAXUART_RXPIN_B0 = IOPORT_PIN('B', 0), // PCINT0 MAXUART_RXPIN_B1 = IOPORT_PIN('B', 1), // PCINT0 MAXUART_RXPIN_B2 = IOPORT_PIN('B', 2), // PCINT0 MAXUART_RXPIN_B3 = IOPORT_PIN('B', 3), // PCINT0 MAXUART_RXPIN_B4 = IOPORT_PIN('B', 4), // PCINT0 MAXUART_RXPIN_B5 = IOPORT_PIN('B', 5), // PCINT0 MAXUART_RXPIN_B6 = IOPORT_PIN('B', 6), // PCINT0 MAXUART_RXPIN_B7 = IOPORT_PIN('B', 7), // PCINT0 MAXUART_RXPIN_D0 = IOPORT_PIN('D', 0), // INT0 MAXUART_RXPIN_D1 = IOPORT_PIN('D', 1), // INT1 MAXUART_RXPIN_D2 = IOPORT_PIN('D', 2), // INT2 MAXUART_RXPIN_D3 = IOPORT_PIN('D', 3), // INT3 MAXUART_RXPIN_E6 = IOPORT_PIN('E', 6), // INT6 MAXUART_RXPIN_DISABLE = 0xFF, } MAXUART_RXPIN; #define MAXUART_RXPIN_B0_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B1_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B2_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B3_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B4_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B5_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B6_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B7_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_Bn_ISR(T) \ ISR(PCINT0_vect, ISR_NAKED) \ { \ T::receive(); \ reti(); \ } #define MAXUART_RXPIN_D0_ISR(T) \ ISR(INT0_vect, ISR_NAKED) \ { \ T::receive(); \ reti(); \ } #define MAXUART_RXPIN_D1_ISR(T) \ ISR(INT1_vect, ISR_NAKED) \ { \ T::receive(); \ reti(); \ } #define MAXUART_RXPIN_D2_ISR(T) \ ISR(INT2_vect, ISR_NAKED) \ { \ T::receive(); \ reti(); \ } #define MAXUART_RXPIN_D3_ISR(T) \ ISR(INT3_vect, ISR_NAKED) \ { \ T::receive(); \ reti(); \ } #define MAXUART_RXPIN_E6_ISR(T) \ ISR(INT6_vect, ISR_NAKED) \ { \ T::receive(); \ reti(); \ } #elif defined(_ATTINY85_) typedef enum { MAXUART_RXPIN_B0 = IOPORT_PIN('B', 0), // PCINT0 MAXUART_RXPIN_B1 = IOPORT_PIN('B', 1), // PCINT0 MAXUART_RXPIN_B2 = IOPORT_PIN('B', 2), // INT0 MAXUART_RXPIN_B3 = IOPORT_PIN('B', 3), // PCINT0 MAXUART_RXPIN_B4 = IOPORT_PIN('B', 4), // PCINT0 MAXUART_RXPIN_B5 = IOPORT_PIN('B', 5), // PCINT0 MAXUART_RXPIN_DISABLE = 0xFF, } MAXUART_RXPIN; #define MAXUART_RXPIN_B0_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B1_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B3_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B4_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_B5_ISR(T) MAXUART_RXPIN_Bn_ISR(T) #define MAXUART_RXPIN_Bn_ISR(T) \ ISR(PCINT0_vect, ISR_NAKED) \ { \ T::receive(); \ reti(); \ } #define MAXUART_RXPIN_B2_ISR(T) \ ISR(INT0_vect, ISR_NAKED) \ { \ T::receive(); \ reti(); \ } #endif typedef uint8_t MAXUART_TXPIN; #define MAXUART_TXPIN_DISABLE (MAXUART_TXPIN)0xFF #define MAXUART_RXBUF_SIZE (1 << RXBUF_SIZE) #define MAXUART_RXBUF_OFFS(p) ((p) & (MAXUART_RXBUF_SIZE - 1)) #define MAXUART_START_CYCLE (3 + 5 + 10) // LATCH(3-5) + INTERRUPT(5-7) + Overhead(10) #define MAXUART_DELAY_CYCLE 3 // cycle of delay loop #define MAXUART_SHIFT_CYCLE 2 // cycle of bit assembly #define MAXUART_CLOCK_CYCLE ((float)F_CPU / BAUDRATE) #define MAXUART_SWCLK_CYCLE (int)(MAXUART_CLOCK_CYCLE + 0.5) #define MAXUART_DELAY(n, m) \ do \ { \ int cycle = 0; \ float error = MAXUART_CLOCK_CYCLE - MAXUART_SWCLK_CYCLE; \ float round = (error < 0 ? -0.5 : 0.5); \ error -= (int)error; \ if (((int)(error * (n) + round) ^ (int)(error * ((n) + 1) + round)) & 1) \ cycle += (error < 0 ? -1 : 1); \ if ((cycle += MAXUART_SWCLK_CYCLE - MAXUART_SHIFT_CYCLE + (m)) > 0) \ { \ if (cycle / MAXUART_DELAY_CYCLE) \ __asm__ volatile \ ( \ "ldi r27, %[_COUNT_]" "\n\t" \ "1: dec r27" "\n\t" \ "brne 1b" "\n\t" \ : \ : [_COUNT_] "M" (cycle / MAXUART_DELAY_CYCLE) \ : "r27" \ ); \ if ((cycle % MAXUART_DELAY_CYCLE) > 0) \ __asm__ volatile ("nop"); \ if ((cycle % MAXUART_DELAY_CYCLE) > 1) \ __asm__ volatile ("nop"); \ } \ } \ while (0) #define MAXUART_CLEAR_IFR(reg, pos) \ __asm__ volatile \ ( \ "ldi r24, 1 << %[_POS_]" "\n\t" \ "out %[_REG_], r24" "\n\t" \ : \ : [_REG_] "M" (_SFR_IO_ADDR(reg)) \ , [_POS_] "M" (pos) \ : "r24" \ ); template<uint32_t BAUDRATE, MAXUART_TXPIN TXPIN = MAXUART_TXPIN_DISABLE, MAXUART_RXPIN RXPIN = MAXUART_RXPIN_DISABLE, uint8_t RXBUF_SIZE = 5> class MaxUart { private: static uint8_t _rx_buf[MAXUART_RXBUF_SIZE]; static uint8_t _rx_get; static volatile uint8_t _rx_put; #if defined(_ATMEGA328_) static void control(bool enable) __attribute__((always_inline)) { switch (RXPIN) { case MAXUART_RXPIN_D2: if (enable) { EICRA = (EICRA & ~_BV(ISC00)) | _BV(ISC01); EIFR = _BV(INTF0); EIMSK |= _BV(INT0); } else EIMSK &= ~_BV(INT0); break; case MAXUART_RXPIN_D3: if (enable) { EICRA = (EICRA & ~_BV(ISC10)) | _BV(ISC11); EIFR = _BV(INTF1); EIMSK |= _BV(INT1); } else EIMSK &= ~_BV(INT1); break; default: switch (IOPORT_PORTID(RXPIN)) { case IOPORT_PID('B'): if (enable) { PCIFR = _BV(PCIF0); PCICR |= _BV(PCIE0); PCMSK0 |= IOPORT_PINVAL(RXPIN); } else PCMSK0 &= ~IOPORT_PINVAL(RXPIN); break; case IOPORT_PID('C'): if (enable) { PCIFR = _BV(PCIF1); PCICR |= _BV(PCIE1); PCMSK1 |= IOPORT_PINVAL(RXPIN); } else PCMSK1 &= ~IOPORT_PINVAL(RXPIN); break; case IOPORT_PID('D'): if (enable) { PCIFR = _BV(PCIF2); PCICR |= _BV(PCIE2); PCMSK2 |= IOPORT_PINVAL(RXPIN); } else PCMSK2 &= ~IOPORT_PINVAL(RXPIN); break; } break; } } static void clear_ifr(void) __attribute__((always_inline)) { switch (RXPIN) { case MAXUART_RXPIN_D2: MAXUART_CLEAR_IFR(EIFR, INTF0); break; case MAXUART_RXPIN_D3: MAXUART_CLEAR_IFR(EIFR, INTF1); break; default: switch (IOPORT_PORTID(RXPIN)) { case IOPORT_PID('B'): MAXUART_CLEAR_IFR(PCIFR, PCIF0); break; case IOPORT_PID('C'): MAXUART_CLEAR_IFR(PCIFR, PCIF1); break; case IOPORT_PID('D'): MAXUART_CLEAR_IFR(PCIFR, PCIF2); break; } break; } } #elif defined(_ATMEGA32U4_) static void control(bool enable) __attribute__((always_inline)) { switch (RXPIN) { case MAXUART_RXPIN_D0: if (enable) { EICRA = (EICRA & ~_BV(ISC00)) | _BV(ISC01); EIFR = IOPORT_PINVAL(RXPIN); EIMSK |= IOPORT_PINVAL(RXPIN); } else EIMSK &= ~IOPORT_PINVAL(RXPIN); break; case MAXUART_RXPIN_D1: if (enable) { EICRA = (EICRA & ~_BV(ISC10)) | _BV(ISC11); EIFR = IOPORT_PINVAL(RXPIN); EIMSK |= IOPORT_PINVAL(RXPIN); } else EIMSK &= ~IOPORT_PINVAL(RXPIN); break; case MAXUART_RXPIN_D2: if (enable) { EICRA = (EICRA & ~_BV(ISC20)) | _BV(ISC21); EIFR = IOPORT_PINVAL(RXPIN); EIMSK |= IOPORT_PINVAL(RXPIN); } else EIMSK &= ~IOPORT_PINVAL(RXPIN); break; case MAXUART_RXPIN_D3: if (enable) { EICRA = (EICRA & ~_BV(ISC30)) | _BV(ISC31); EIFR = IOPORT_PINVAL(RXPIN); EIMSK |= IOPORT_PINVAL(RXPIN); } else EIMSK &= ~IOPORT_PINVAL(RXPIN); break; case MAXUART_RXPIN_E6: if (enable) { EICRB = (EICRB & ~_BV(ISC60)) | _BV(ISC61); EIFR = IOPORT_PINVAL(RXPIN); EIMSK |= IOPORT_PINVAL(RXPIN); } else EIMSK &= ~IOPORT_PINVAL(RXPIN); break; default: if (enable) { PCIFR = _BV(PCIF0); PCICR |= _BV(PCIE0); PCMSK0 |= IOPORT_PINVAL(RXPIN); } else PCMSK0 &= ~IOPORT_PINVAL(RXPIN); break; } } static void clear_ifr(void) __attribute__((always_inline)) { switch (RXPIN) { case MAXUART_RXPIN_D0: case MAXUART_RXPIN_D1: case MAXUART_RXPIN_D2: case MAXUART_RXPIN_D3: case MAXUART_RXPIN_E6: MAXUART_CLEAR_IFR(EIFR, IOPORT_PINPOS(RXPIN)); break; default: MAXUART_CLEAR_IFR(PCIFR, PCIF0); break; } } #elif defined(_ATTINY85_) static void control(bool enable) __attribute__((always_inline)) { switch (RXPIN) { case MAXUART_RXPIN_B2: if (enable) { MCUCR = (MCUCR & ~_BV(ISC00)) | _BV(ISC01); GIFR = _BV(INTF0); GIMSK |= _BV(INT0); } else GIMSK &= ~_BV(INT0); break; default: if (enable) { GIFR = _BV(PCIF); GIMSK |= _BV(PCIE); PCMSK |= IOPORT_PINVAL(RXPIN); } else PCMSK &= ~IOPORT_PINVAL(RXPIN); break; } } static void clear_ifr(void) __attribute__((always_inline)) { switch (RXPIN) { case MAXUART_RXPIN_B2: MAXUART_CLEAR_IFR(GIFR, INTF0); break; default: MAXUART_CLEAR_IFR(GIFR, PCIF); break; } } #endif public: static bool begin(void) { #ifdef MAXUART_DEBUG_PORT IOPORT::pinMode(MAXUART_DEBUG_PORT, OUTPUT); #endif clear(); if (TXPIN != MAXUART_TXPIN_DISABLE) { IOPORT::digitalWrite(TXPIN, HIGH); IOPORT::pinMode(TXPIN, OUTPUT); } if (RXPIN != MAXUART_RXPIN_DISABLE) { if (MAXUART_SWCLK_CYCLE >= 256 * MAXUART_DELAY_CYCLE + MAXUART_SHIFT_CYCLE - 1) return false; IOPORT::pinMode(RXPIN, INPUT_PULLUP); control(true); } return true; } static void end(void) { if (RXPIN != MAXUART_RXPIN_DISABLE) { control(false); IOPORT::pinMode(RXPIN, INPUT); } if (TXPIN != MAXUART_TXPIN_DISABLE) IOPORT::pinMode(TXPIN, INPUT); } static void clear(void) { _rx_put = 0; _rx_get = 0; } static uint8_t available(void) { return MAXUART_RXBUF_OFFS(_rx_put - _rx_get); } static int read(void) { return available() ? _rx_buf[MAXUART_RXBUF_OFFS(_rx_get++)] : -1; } static uint8_t read(uint8_t *buf, uint8_t len) { uint8_t rv = available(); if (len > rv) len = rv; else rv = len; while (len--) *buf++ = _rx_buf[MAXUART_RXBUF_OFFS(_rx_get++)]; return rv; } static void receive() __attribute__((always_inline)) { #ifdef MAXUART_DEBUG_PORT IOPORT::toggleOutput(MAXUART_DEBUG_PORT); #endif __asm__ volatile ( "sbic %[_PORT_], %[_POS_]" "\n\t" "rjmp 9f" "\n\t" "push r27" "\n\t" "push r24" "\n\t" "in r24, __SREG__" "\n\t" "push r24" "\n\t" : : [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_INREG(RXPIN))) , [_POS_ ] "I" (IOPORT_PINPOS(RXPIN)) , [_PUT_ ] "m" (_rx_put) ); MAXUART_DELAY(0, MAXUART_SWCLK_CYCLE / 2 - MAXUART_START_CYCLE); __asm__ volatile ( "0:" "\n\t" "clr r24" "\n\t" ); #ifdef MAXUART_DEBUG_PORT IOPORT::toggleOutput(MAXUART_DEBUG_PORT); #endif __asm__ volatile ( "sbic %[_PORT_], %[_POS_]" "\n\t" "ori r24, %[_BIT_]" "\n\t" : : [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_INREG(RXPIN))) , [_POS_ ] "I" (IOPORT_PINPOS(RXPIN)) , [_BIT_ ] "M" (0x01) ); MAXUART_DELAY(1, 0); __asm__ volatile ( "sbic %[_PORT_], %[_POS_]" "\n\t" "ori r24, %[_BIT_]" "\n\t" : : [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_INREG(RXPIN))) , [_POS_ ] "I" (IOPORT_PINPOS(RXPIN)) , [_BIT_ ] "M" (0x02) ); MAXUART_DELAY(2, 0); __asm__ volatile ( "sbic %[_PORT_], %[_POS_]" "\n\t" "ori r24, %[_BIT_]" "\n\t" : : [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_INREG(RXPIN))) , [_POS_ ] "I" (IOPORT_PINPOS(RXPIN)) , [_BIT_ ] "M" (0x04) ); MAXUART_DELAY(3, 0); __asm__ volatile ( "sbic %[_PORT_], %[_POS_]" "\n\t" "ori r24, %[_BIT_]" "\n\t" : : [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_INREG(RXPIN))) , [_POS_ ] "I" (IOPORT_PINPOS(RXPIN)) , [_BIT_ ] "M" (0x08) ); MAXUART_DELAY(4, 0); __asm__ volatile ( "sbic %[_PORT_], %[_POS_]" "\n\t" "ori r24, %[_BIT_]" "\n\t" : : [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_INREG(RXPIN))) , [_POS_ ] "I" (IOPORT_PINPOS(RXPIN)) , [_BIT_ ] "M" (0x10) ); MAXUART_DELAY(5, 0); __asm__ volatile ( "sbic %[_PORT_], %[_POS_]" "\n\t" "ori r24, %[_BIT_]" "\n\t" : : [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_INREG(RXPIN))) , [_POS_ ] "I" (IOPORT_PINPOS(RXPIN)) , [_BIT_ ] "M" (0x20) ); MAXUART_DELAY(6, 0); __asm__ volatile ( "sbic %[_PORT_], %[_POS_]" "\n\t" "ori r24, %[_BIT_]" "\n\t" : : [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_INREG(RXPIN))) , [_POS_ ] "I" (IOPORT_PINPOS(RXPIN)) , [_BIT_ ] "M" (0x40) ); MAXUART_DELAY(7, 0); __asm__ volatile ( "sbic %[_PORT_], %[_POS_]" "\n\t" "ori r24, %[_BIT_]" "\n\t" : : [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_INREG(RXPIN))) , [_POS_ ] "I" (IOPORT_PINPOS(RXPIN)) , [_BIT_ ] "M" (0x80) ); __asm__ volatile ( "push r26" "\n\t" "lds r26, %[_PUT_]" "\n\t" "lds r27, %[_GET_]" "\n\t" "inc r26" "\n\t" "andi r26, %[_MSK_]" "\n\t" "andi r27, %[_MSK_]" "\n\t" "cpse r26, r27" "\n\t" "sts %[_PUT_], r26" "\n\t" "dec r26" "\n\t" "andi r26, %[_MSK_]" "\n\t" "clr r27" "\n\t" "subi r26, lo8(-(%[_BUF_]))" "\n\t" "sbci r27, hi8(-(%[_BUF_]))" "\n\t" "st x, r24" "\n\t" "pop r26" "\n\t" : : [_GET_] "m" (_rx_get) , [_PUT_] "m" (_rx_put) , [_BUF_] "m" (_rx_buf) , [_MSK_] "M" (MAXUART_RXBUF_SIZE - 1) ); if (MAXUART_CLOCK_CYCLE >= 32) { __asm__ volatile ( "7:" "\n\t" "sbis %[_PORT_], %[_POS_]" "\n\t" "rjmp 7b" "\n\t" : : [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_INREG(RXPIN))) , [_POS_ ] "I" (IOPORT_PINPOS(RXPIN)) ); } else { __asm__ volatile ( "sbis %[_PORT_], %[_POS_]" "\n\t" "rjmp 7f" "\n\t" "sbis %[_PORT_], %[_POS_]" "\n\t" "rjmp 7f" "\n\t" "sbis %[_PORT_], %[_POS_]" "\n\t" "rjmp 7f" "\n\t" "sbis %[_PORT_], %[_POS_]" "\n\t" "rjmp 7f" "\n\t" "sbis %[_PORT_], %[_POS_]" "\n\t" "rjmp 7f" "\n\t" "sbic %[_PORT_], %[_POS_]" "\n\t" "rjmp 8f" "\n\t" "7:" "\n\t" : : [_PORT_ ] "I" (_SFR_IO_ADDR(IOPORT_INREG(RXPIN))) , [_POS_ ] "I" (IOPORT_PINPOS(RXPIN)) ); MAXUART_DELAY(0, MAXUART_SWCLK_CYCLE / 2 - 8); __asm__ volatile ( "rjmp 0b" "\n\t" "8:" "\n\t" ); } clear_ifr(); __asm__ volatile ( "pop r24" "\n\t" "out __SREG__, r24" "\n\t" "pop r24" "\n\t" "pop r27" "\n\t" "9:" "\n\t" ); } static void write(uint8_t data) { if (MAXUART_SWCLK_CYCLE >= 256 * MAXUART_DELAY_CYCLE + MAXUART_SHIFT_CYCLE - 1) return; __asm__ volatile ( "mov r25, %[_DATA_]" "\n\t" "lsl r25" "\n\t" "eor %[_DATA_], r25" "\n\t" "ldi r25, 1 << %[_POS_]" "\n\t" "in r23, __SREG__" "\n\t" "cli" "\n\t" "out %[_PORT_], r25" "\n\t" : [_DATA_] "=r" (data) : [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(TXPIN))) , [_POS_ ] "I" (IOPORT_PINPOS(TXPIN)) : "r23", "r25" ); MAXUART_DELAY(0, 0); __asm__ volatile ( "sbrc %[_DATA_], 0" "\n\t" "out %[_PORT_], r25" "\n\t" : : [_DATA_] "r" (data) , [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(TXPIN))) ); MAXUART_DELAY(1, 0); __asm__ volatile ( "sbrc %[_DATA_], 1" "\n\t" "out %[_PORT_], r25" "\n\t" : : [_DATA_] "r" (data) , [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(TXPIN))) ); MAXUART_DELAY(2, 0); __asm__ volatile ( "sbrc %[_DATA_], 2" "\n\t" "out %[_PORT_], r25" "\n\t" : : [_DATA_] "r" (data) , [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(TXPIN))) ); MAXUART_DELAY(3, 0); __asm__ volatile ( "sbrc %[_DATA_], 3" "\n\t" "out %[_PORT_], r25" "\n\t" : : [_DATA_] "r" (data) , [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(TXPIN))) ); MAXUART_DELAY(4, 0); __asm__ volatile ( "sbrc %[_DATA_], 4" "\n\t" "out %[_PORT_], r25" "\n\t" : : [_DATA_] "r" (data) , [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(TXPIN))) ); MAXUART_DELAY(5, 0); __asm__ volatile ( "sbrc %[_DATA_], 5" "\n\t" "out %[_PORT_], r25" "\n\t" : : [_DATA_] "r" (data) , [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(TXPIN))) ); MAXUART_DELAY(6, 0); __asm__ volatile ( "sbrc %[_DATA_], 6" "\n\t" "out %[_PORT_], r25" "\n\t" : : [_DATA_] "r" (data) , [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(TXPIN))) ); MAXUART_DELAY(7, 0); __asm__ volatile ( "sbrc %[_DATA_], 7" "\n\t" "out %[_PORT_], r25" "\n\t" : : [_DATA_] "r" (data) , [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(TXPIN))) ); MAXUART_DELAY(8, 0); __asm__ volatile ( "sbis %[_POUT_], %[_POS_]" "\n\t" "out %[_PORT_], r25" "\n\t" "out __SREG__, r23" "\n\t" : : [_POUT_] "I" (_SFR_IO_ADDR(IOPORT_OUTREG(TXPIN))) , [_PORT_] "I" (_SFR_IO_ADDR(IOPORT_TGLREG(TXPIN))) , [_POS_ ] "I" (IOPORT_PINPOS(TXPIN)) ); MAXUART_DELAY(9, 0); } static void write(uint8_t *buf, uint8_t len) { while (len--) write(*buf++); } }; template<uint32_t BAUDRATE, MAXUART_TXPIN TXPIN, MAXUART_RXPIN RXPIN, uint8_t RXBUF_SIZE> uint8_t MaxUart<BAUDRATE, TXPIN, RXPIN, RXBUF_SIZE>::_rx_buf[MAXUART_RXBUF_SIZE]; template<uint32_t BAUDRATE, MAXUART_TXPIN TXPIN, MAXUART_RXPIN RXPIN, uint8_t RXBUF_SIZE> uint8_t MaxUart<BAUDRATE, TXPIN, RXPIN, RXBUF_SIZE>::_rx_get; template<uint32_t BAUDRATE, MAXUART_TXPIN TXPIN, MAXUART_RXPIN RXPIN, uint8_t RXBUF_SIZE> volatile uint8_t MaxUart<BAUDRATE, TXPIN, RXPIN, RXBUF_SIZE>::_rx_put; #endif |
【参照ライブラリ】
AVR用高速GPIOライブラリ
ATmega328では未検証との事でしたが、ひとまずarduino unoで試させてもらいました。
当初57600bpsや115200bpsで運用しようとしていました。
その際に送信は想定通りうまく行き、受信は1バイト毎に余計なデータが挿入されたものが取得できました。
おかしいと思いソースを解読しようと思ったのですが、一度1Mbpsでも試しておこうと設定したところ、送受信ともに成功することが分かりました。
1Mbps以上ではいずれもうまく行くことから、何かしらの調整が必要なのか、はたまたATmega328P依存なのかといった所を少しアシストしていただけると嬉しいです。
ちなみに半二重の環境です。
maxuart.hはATmega328上での動作確認がなされていないとの事でしたが、Arduino UNOに適用してみました。
115200bpsにおいて送信は問題なく、受信は1バイト毎に無用なデータが挿入されることを確認。
115200bps以下でも同様のためソースを追ってみようと思ったのですが、ふと高速ではどうだろうと1Mbpsで試したところ送受信とも問題なく。1Mbps以上では問題ない事を確認。
低速時における挙動について、何かヒントをいただければと。
コメントありがとうございます。
コメントがスパムと判断されていて気づくのに時間がかかってしまいました。また、正しい記事のほうにコメントとして記載させていただきました。
挙動から推測すると受信後に無用な受信割込みが発生しているものと思われたのでコードを見直してみたら...あきらかに間違ってるところがありました。タイプ・ミスみたいですね...(-_-;)
706行目
誤 if (MAXUART_SHIFT_CYCLE >= 32)
正 if (MAXUART_CLOCK_CYCLE >= 32)
投稿内のコードは修正しておきました。
これが原因だとは思いますが、こちらでは試験できないので再度試してみていただけないでしょうか?
こちらこそレスいただいているのに気付かず放置してしまいました。
早速57600bpsで試しましたところ、所望の挙動に至りました。
全域においてなかなかヨサゲです。
テスト&コメント頂きありがとうございます。
感謝!<(_ _)>