
Last Updated on 2022-06-13 by researcher
前回投稿のライブラリを改良して Raspberry Pi Pico 用のSMPタスクスイッチングライブラリを作成してみた。
世界最速のタスク・スイッチ・ライブラリ (Task Switch Library for ARM-G++ [M0/M0+/M1])
コアの排他制御処理の分だけスイッチング速度は少し遅くなってしまったが、それでも1.0usは楽に切っている。
旧: RP2040(125MHz): 82 cycles (0.656us)
※2022-02-08に追加したタスク情報の保存/復旧処理のためにサイクル数が若干増えたがなんとか1.0us未満に収まった。
新: RP2040(125MHz): 104 cycles (0.832us)
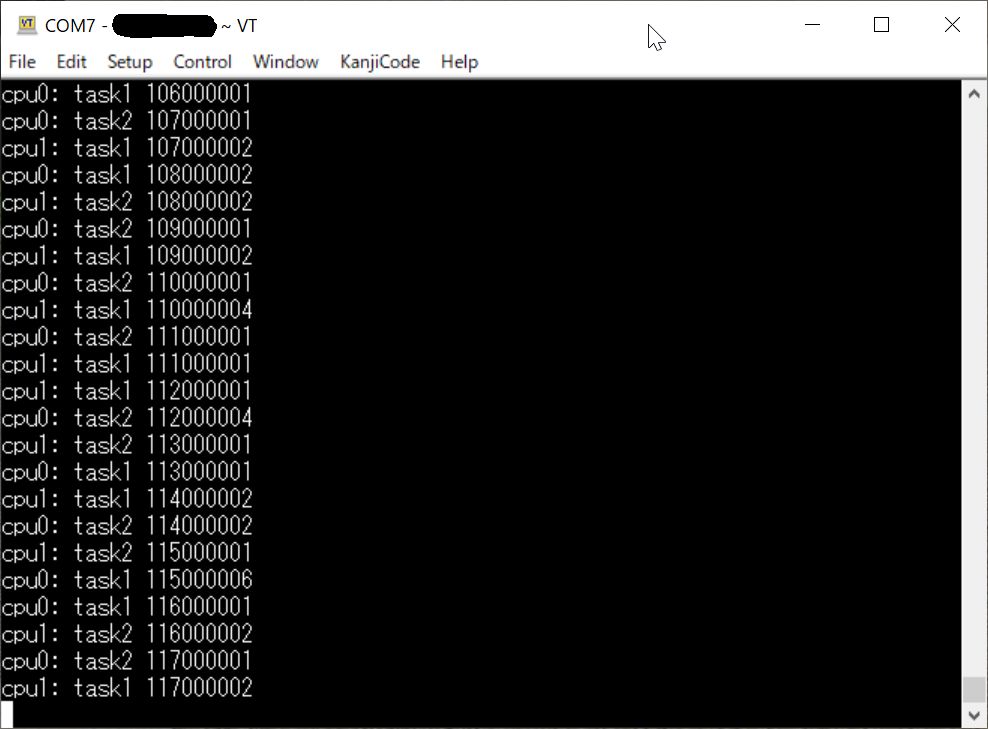
[SMPで動作しているところ]
※PicoのSMPでは2タスクが同時に実行状態になる。
前回投稿のライブラリを改良しただけなので実装は比較的楽だったのだがPico特有の落とし穴もあった。arm系にはSysTickと呼ばれるシステムクロックで動作するタイマーがありマイクロ秒以下の時間測定には必要なものなのだがなぜかSDKでは未サポートらしい。とりあえずSysTickを使えるようにしてみたところSMPでは誤動作してしまうという現象が...
SysTickはコア毎に存在しており、実行コア側のSysTickにしかアクセスできない。SMPではタスクが実行されるコアが不定=どのコアのSysTickにアクセスするかわからないということが原因だった。
例えば、次のコードではyield()実行前後で別のコアに切り替わることがある。micros()がSysTickで実装されていて各SysTickの同期がとれていないと仮定した場合、どのコアからアクセスされるかによりmicros()が返す時間情報が前後してしまうことになる。
|
1 2 3 4 5 6 7 |
void Task::delayMicroseconds(uint32_t us) { uint32_t t = micros(); // <-- Core0 do yield(); while(micros() - t < us); // <-- Core1 } |
この問題は、各SysTickを同時スタートすることで解決できる。
具体的な実装は次のメソッドのコードを見てほしい。ちなみに対策後に上の例のmicros()が返す時間情報が前後することがないか1日中ぶん回してみたが問題はなさそうだ。
void Task::begin([[maybe_unused]] bool multicore)
void Task::core1()
また、SysTickと同じくNVIC(割り込みコントローラ)もコア毎なので割り込み処理には特別な注意が必要となる。Picoだと割り込み処理を含むHWドライバー等をSMP対応するのは大変そうというか可能なら割り込みは使わない方が無難な気も...
ちなみに、優先度ベースのRTOSをSMP対応すると優先度が高いタスクの実行中に優先度が低いタスクが同時実行されることがありコア数が多くなるほど優先度ベースである意味が薄れてくることになる。力は技に勝るというべきか...(-_-;)
プログラムの書き込みは以前に投稿したUSBスイッチを使うとUSBの抜き差しなしで出来るので凄く便利だ。参考まで。
[pico_smp.cpp]
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 |
/** * SMP Task Switching Sample */ #include <stdio.h> #include <pico/stdlib.h> #include "task.h" void task1(void) { while (1) { printf("cpu%u: task1(%08X) %u\n", Task::cpuid(), Task::taskid(), time_us_32()); Task::delay(1000); } } void task2(void) { while (1) { printf("cpu%u: task2(%08X) %u\n", Task::cpuid(), Task::taskid(), time_us_32()); Task::delay(1000); } } void setup(void) { printf("MultiCore Task Switching\n"); Task::begin(); Task::start(task1); Task::start(task2); } void loop(void) { Task::yield(); } int main() { stdio_init_all(); setup(); while (1) loop(); return 0; } |
[timer_sample.cpp]
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 |
/** * Timer Sample */ #include <stdio.h> #include <pico/stdlib.h> #include "timer.h" or "task.h" #define LED_PIN 25 Alarm alarm; bool timeup(Alarm& alarm) { gpio_xor_mask(1 << LED_PIN); return true; } void setup(void) { gpio_init(LED_PIN); gpio_set_dir(LED_PIN, GPIO_OUT); Timer::begin(); or Task::begin(); Timer.start(alarm.interval(1000000).handler(timeup)); } void loop(void) { } int main() { stdio_init_all(); setup(); while (1) loop(); return 0; } |
[update]
2022-02-18
PCEventクラスの仕様変更とチューニング、及び、Task::taskid()の型をvoid *からsize_tに変更。
2022-02-17
GPIOを監視するためのライブラリ(pcevent.h/pcevent.cpp)を追加。
PCEventクラスはGPIO割込を管理し割込ハンドラの呼び出しや指定のピン状態になるまでタスクを休止することができる。またキャプチャー処理のためのエッジ割込の時間(time_us_32)も取得可能だ。ピンの割込のみ管理しているので利用する前にピンを適切に初期化しておく必要がある。PCEventクラスを利用することでマルチタスク環境にてピンの監視処理を効率よく行うことが可能となる。
※Pico-SDKのGPIO割り込み機能とは排他的に利用可能であることに注意!。
|
1 |
PCEvent.wait(pin, PCEVENT_LEVEL_LOW, timeout); |
タイムアウト或いはピンがLOWになるまで休止する。既にLOWの場合は即座に戻る。
|
1 |
PCEvent.wait(pin, PCEVENT_LEVEL_HIGH, timeout); |
タイムアウト或いはピンがHIGHになるまで休止する。既にHIGHの場合は即座に戻る。
|
1 |
PCEvent.wait(pin, PCEVENT_EDGE_FALL, timeout); |
タイムアウト或いは次回のピンの立下りまで休止する。
|
1 |
PCEvent.wait(pin, PCEVENT_EDGE_RISE, timeout); |
タイムアウト或いは次回のピンの立上がりまで休止する。
|
1 |
PCEvent.wait(pin, PCEVENT_EDGE_BOTH, timeout); |
タイムアウト或いは次回のピンの立下り或いは立上がりまで休止する。
※タイムアウトの指定値がゼロの場合は状態を見て即座に戻り、マイナス値の場合は無限に、ゼロより大きい場合は指定時間まで待つ。
※戻り値がSYNC_TIMEOUTEDならタイムアウト発生、それ以外はイベント待ち完了。
2022-02-08
全タスクが休止するときに誤動作するという致命的なバグがあったので修正。それとタスク固有の識別子やデータを管理できるようにしてみた。
|
1 |
size_t Task::taskid(void); |
タスク識別子の取得。
|
1 |
void *Task::data(void); |
タスク固有データの取得。Task::start(void *data)で指定したデータが取得できる。
|
1 |
void stop(void); |
割当てされたメモリを解放しタスクを終了する。タスク関数からのリターン、或いは、この関数の呼び出しにより何時でもタスク終了することができる。
|
1 |
bool start(void (&func)(void), void *data = nullptr, size_t size = DEFAULT_STACK_SIZE, void *stack = nullptr); |
Task::start() … タスク固有データの指定に加えタスクのスタック領域のための静的メモリの指定もできるようにしてみた。
2022-02-07
Event/Sem/Mutexクラスのタイミング・バグがまだ残っていたので再改修。これで完璧...かも。(-_-;)
2022-02-06
Event/Sem/Mutexクラスのタイミング・バグがあまりに酷すぎたので全面的に改修。
2022-02-05
Eventクラスのバグを修正。おまけとしてSemaphoreクラスとMutexクラスを追加。但し、デバッグはしてないので注意すべし。
2022-02-04
シンプルかつ単機能なEventクラスを追加してみた。
|
1 |
template<size_t MASK = SIZE_MAX, bool WAITALL = false> class Event |
Eventテンプレートクラス。マスク値(MASK)と待ち方(WAITALL)が指定可能。
|
1 |
int wait(int64_t timeout = -1) |
イベント発生まで休止する。タイムアウト指定が可能。
|
1 |
void post(uint8_t event = 0) |
イベント通知する。複数タスクが待っている場合は休止順に起床する。event引数には0-31までのビット番号を指定する。
2022-01-13
Alarmクラスの仕様変更とそれに伴う修正を行った。
2022-01-12
タイマークラスの仕様変更と、Sync::sleep()の戻り値でタイムアウト判定が出来るようにしてみた。
2022-01-11
全体的な最適化とsleep()のタイムアウト機能がタスクとの関連性がないというヘンな仕様だったので修正。
2022-01-10
Pico-SDKのタイマーライブラリはコア依存があり扱いが面倒であったため、コアに依然せずに使えるマルチコア対応のタイマーライブラリを作成してみた。これに伴い、Pico-SDKのタイマーライブラリを利用していたコードを削除するとともに時間指定する関数は全てマイクロ秒で統一してみた。
新たなタイマーライブラリはTimer::begin()を呼び出したコア側でのみ割り込み処理を行うが、実行コアを気にせずに使えることやアラーム数が無制限であること、及び、正確なリピート時間を特徴としている。
2021-12-14
SysTick::micros()を割り込み禁止状態からの呼び出しにも対応。
2021-12-10
タスク休止/起床方式のdelay()/delayMicroseconds()のオーバーヘッドが大きく時間が少し不正確な感じなので名称を変更しsleep()/sleepMicroseconds()として新たに関数を追加。今まで通りポーリング方式のdelay()/delayMicroseconds()も利用可能。待つ時間が長い場合はsleep、短い時間であればdelayのように使い分けするのが良さそうだ。
2021-12-09
Task::delay()/Task::dealyMicroseconds()をポーリングによる実装からPico-SDKのalarm機能を利用してタスク休止/起床する実装に改良してみた。おまけとしてget_alarm_pool()を追加。get_alarm_pool()によりSMP環境で実行コアに対して適切なalarm_poolを取得することができるようになる。それと、Sync::sleep()がコンパイラ最適化によりインライン展開されると誤動作するためインライン展開させないように修正。
[Library]
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 |
/* task.h - SMP Task Switching Library for Paspberry Pi Pico (RP2040) Copyright (c) 2021 Sasapea's Lab. All right reserved. This library is free software; you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation; either version 2.1 of the License, or (at your option) any later version. This library is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details. You should have received a copy of the GNU Lesser General Public License along with this library; if not, write to the Free Software Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA */ #pragma once #include <stddef.h> #include <stdint.h> #include <stdbool.h> #if defined(PICO_ON_DEVICE) #define RP2040 1 #define NUMBER_OF_CORES 2 #include "systick.h" #include "timer.h" #else #define NUMBER_OF_CORES 1 #endif #define DEFAULT_STACK_SIZE 2048 class Task { public: static void begin(bool multicore = true); static bool start(void (&func)(void), void *data = nullptr, size_t size = DEFAULT_STACK_SIZE, void *stack = nullptr); static void stop(void) __attribute__ ((noinline)); static void yield(void) __attribute__ ((naked)); static uint32_t cpuid(void); static size_t taskid(void); static void *data(void); #if RP2040 static void sleep(int64_t us); static void delay(uint32_t us); #endif protected: typedef struct { void *data; void *free; } task_t; typedef size_t reg_t; typedef struct context { reg_t _r8; reg_t _r9; reg_t _sl; reg_t _fp; reg_t _rsv; // r0 reg_t _task; // r1 struct context *_next; // r2 reg_t _primask; // r3 reg_t _r4; reg_t _r5; reg_t _r6; reg_t _r7; reg_t _lr; } context_t; typedef struct { context_t *head; context_t *tail; } queue_t; static void invoke(void) __attribute__ ((naked)); static void dispatch(void) __attribute__ ((naked)); static void append(context_t *head, context_t *tail); static void prepend(context_t *head, context_t *tail); static task_t *_task[NUMBER_OF_CORES]; private: static void begin1(void) __attribute__ ((naked)); static queue_t _queue; }; #define SYNC_WAKEUPED 0 #define SYNC_TIMEOUTED -1 #define SYNC_BLOCKED 0x80000000 class Sync : protected Task { public: Sync(void) : _queue({}), _wakeup(0) {} virtual ~Sync(void) { wakeup(true); } #if RP2040 int sleep(int64_t timeout = -1, uint32_t save = 0); #else int sleep(uint32_t save = 0) __attribute__((noinline)); #endif void wakeup(bool all = false, bool prepend = false); protected: #if RP2040 static bool alarm_handler(Alarm& alarm); void timeout(Alarm& alarm); int sleep0(Alarm& alarm, uint32_t save) __attribute__((noinline)); #endif bool wakeup0(bool all = false, bool prepend = false); bool wakeup0(size_t taskid); size_t wakeuped(bool confirmed = false); static void lock(void); static void unlock(void); static uint32_t blocking(void); static void unblocking(uint32_t save); private: queue_t _queue; size_t _wakeup; }; template<size_t MASK = SIZE_MAX, bool WAITALL = false> class Event : protected Sync { public: Event(void) : _events(0) { } virtual ~Event(void) {} int wait(int64_t timeout = -1) { int rv = SYNC_TIMEOUTED; uint32_t save = blocking(); if (!wakeuped() && match()) { _events = 0; rv = SYNC_WAKEUPED; } else if (timeout) { #if RP2040 rv = sleep(timeout, SYNC_BLOCKED | save); #else rv = sleep(SYNC_BLOCKED | save); #endif blocking(); if (rv == SYNC_WAKEUPED) { wakeuped(true); if (match()) { if (wakeup0()) _events = 0; } } } unblocking(save); return rv; } void post(uint8_t event = 0) { uint32_t save = blocking(); _events |= (1 << event) & MASK; if (match()) { if (wakeup0()) _events = 0; } unblocking(save); } private: bool match(void) { return WAITALL ? _events == MASK : _events != 0; } size_t _events; }; class Sem : protected Sync { public: Sem(size_t init = 1, size_t limit = 1) : _count(init) , _limit(SIZE_MAX) { if (limit) _limit = limit; } virtual ~Sem(void) {} int acquire(int64_t timeout = -1) { int rv = SYNC_TIMEOUTED; uint32_t save = blocking(); if (!wakeuped() && _count) { --_count; rv = SYNC_WAKEUPED; } else if (timeout) { #if RP2040 rv = sleep(timeout, SYNC_BLOCKED | save); #else rv = sleep(SYNC_BLOCKED | save); #endif blocking(); if (rv == SYNC_WAKEUPED) { wakeuped(true); if (_count) { if (wakeup0()) --_count; } } } unblocking(save); return rv; } bool release(void) { uint32_t save = blocking(); bool rv = _count < _limit; if (rv) { if (!wakeup0()) ++_count; } unblocking(save); return rv; } private: size_t _limit; size_t _count; }; class Mutex : protected Sync { public: Mutex(void) : _count(0) , _owner(0) { } virtual ~Mutex(void) {} int lock(int64_t timeout = -1) { int rv; uint32_t save = blocking(); if (_count >= SIZE_MAX) rv = SYNC_TIMEOUTED; else if (!wakeuped() && ((_owner == taskid()) || (_count == 0))) { ++_count; _owner = taskid(); rv = SYNC_WAKEUPED; } else if (timeout) { #if RP2040 rv = sleep(timeout, SYNC_BLOCKED | save); #else rv = sleep(SYNC_BLOCKED | save); #endif blocking(); if (rv == SYNC_WAKEUPED) { wakeuped(true); ++_count; _owner = taskid(); } } unblocking(save); return rv; } size_t unlock(void) { size_t rv = SIZE_MAX; uint32_t save = blocking(); if ((_owner == taskid()) && _count) { rv = --_count; if (rv == 0) wakeup0(); } unblocking(save); return rv; } private: size_t _count; size_t _owner; }; #if RP2040 #include "pcevent.h" #endif |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 606 607 608 609 610 611 612 613 614 615 616 617 618 619 620 621 622 623 624 625 626 627 628 629 630 631 632 633 634 635 636 637 638 639 640 641 642 643 644 645 |
/* task.cpp - SMP Task Switching Library for Paspberry Pi Pico (RP2040) Copyright (c) 2021 Sasapea's Lab. All right reserved. This library is free software; you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation; either version 2.1 of the License, or (at your option) any later version. This library is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details. You should have received a copy of the GNU Lesser General Public License along with this library; if not, write to the Free Software Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA */ #include <stdlib.h> #include <string.h> #include "task.h" #define DECLARE_CRITICAL uint32_t __primask__ #if RP2040 #include <pico/stdlib.h> #include <pico/multicore.h> #if !defined(THREAD_LOCK_ID_TASK) #if defined(PICO_SPINLOCK_ID_OS1) // Pico SDK 1.2 #define THREAD_LOCK_ID_TASK PICO_SPINLOCK_ID_OS1 #else #define THREAD_LOCK_ID_TASK 14 #endif #endif #if !defined(THREAD_LOCK_ID_SYNC) #if defined(PICO_SPINLOCK_ID_OS2) // Pico SDK 1.2 #define THREAD_LOCK_ID_SYNC PICO_SPINLOCK_ID_OS2 #else #define THREAD_LOCK_ID_SYNC 15 #endif #endif #define THREAD_LOCK(lock_num) spin_lock_unsafe_blocking(spin_lock_instance(lock_num)) #define THREAD_UNLOCK(lock_num) spin_unlock_unsafe(spin_lock_instance(lock_num)) #define ENTER_CRITICAL(lock_num) __primask__ = spin_lock_blocking(spin_lock_instance(lock_num)) #define LEAVE_CRITICAL(lock_num) spin_unlock(spin_lock_instance(lock_num), __primask__) #else #define THREAD_LOCK_ID_TASK 0 #define THREAD_LOCK_ID_SYNC 0 #define THREAD_LOCK(lock_num) #define THREAD_UNLOCK(lock_num) #define ENTER_CRITICAL(lock_num) \ ASM("mrs %0, PRIMASK" : "=r" (__primask__)); \ ASM("cpsid i") #define LEAVE_CRITICAL(lock_num) \ ASM("msr PRIMASK, %0" :: "r" (__primask__)) #endif #define ASM __asm__ volatile #if RP2040 #define SAVE_CONTEXT_RETURN_LR() \ /* 3*/ ASM("mov r0, %0" :: "r" (_task) : "r0"); \ /* 1*/ ASM("mov r1, %0" :: "I" ((SIO_BASE + SIO_CPUID_OFFSET) >> 24) : "r1"); \ /* 1*/ ASM("lsl r1, #24" ::: "r1"); \ /* 2*/ ASM("ldr r1, [r1]" ::: "r1"); \ /* 1*/ ASM("lsl r1, #2" ::: "r1"); \ /* 2*/ ASM("ldr r1, [r0, r1]" ::: "r1"); \ /* 1*/ ASM("mov r2, #0" ::: "r2"); \ /* 3*/ ASM("mrs r3, PRIMASK" ::: "r3"); \ /*10*/ ASM("push {r0-r7, lr}" ::: ); \ /* 1*/ ASM("mov r0, r8" ::: "r0"); \ /* 1*/ ASM("mov r1, r9" ::: "r1"); \ /* 1*/ ASM("mov r2, sl" ::: "r2"); \ /* 1*/ ASM("mov r3, fp" ::: "r3"); \ /* 5*/ ASM("push {r0-r3}") /*33*/ #define SAVE_CONTEXT_RETURN_R3() \ /* 2*/ ASM("push {r3}"); \ /* 3*/ ASM("mov r0, %0" :: "r" (_task) : "r0"); \ /* 1*/ ASM("mov r1, %0" :: "I" ((SIO_BASE + SIO_CPUID_OFFSET) >> 24) : "r1"); \ /* 1*/ ASM("lsl r1, #24" ::: "r1"); \ /* 2*/ ASM("ldr r1, [r1]" ::: "r1"); \ /* 1*/ ASM("lsl r1, #2" ::: "r1"); \ /* 2*/ ASM("ldr r1, [r0, r1]" ::: "r1"); \ /* 1*/ ASM("mov r2, #0" ::: "r2"); \ /* 3*/ ASM("mrs r3, PRIMASK" ::: "r3"); \ /* 9*/ ASM("push {r0-r7}" ::: ); \ /* 1*/ ASM("mov r0, r8" ::: "r0"); \ /* 1*/ ASM("mov r1, r9" ::: "r1"); \ /* 1*/ ASM("mov r2, sl" ::: "r2"); \ /* 1*/ ASM("mov r3, fp" ::: "r3"); \ /* 5*/ ASM("push {r0-r3}") /*34*/ #define LOAD_CONTEXT() \ /* 2*/ ASM("ldr r0, [sp, %0]" :: "I" (offsetof(context_t, _primask)) : "r0"); \ /* 3*/ ASM("msr PRIMASK, r0"); \ /* 5*/ ASM("pop {r0-r3}" ::: "r0", "r1", "r2", "r3"); \ /* 1*/ ASM("mov r8, r0" ::: "r8"); \ /* 1*/ ASM("mov r9, r1" ::: "r9"); \ /* 1*/ ASM("mov sl, r2" ::: "sl"); \ /* 1*/ ASM("mov fp, r3" ::: "fp"); \ /* 9*/ ASM("pop {r0-r7}" ::: "r0", "r1", "r2", "r3", "r4", "r5", "r6", "r7"); \ /* 1*/ ASM("mov r2, %0" :: "I" ((SIO_BASE + SIO_CPUID_OFFSET) >> 24) : "r2"); \ /* 1*/ ASM("lsl r2, #24" ::: "r2"); \ /* 2*/ ASM("ldr r2, [r2]" ::: "r2"); \ /* 1*/ ASM("lsl r2, #2" ::: "r2"); \ /* 2*/ ASM("str r1, [r0, r2]" ::: ); \ /* 2*/ ASM("pop {pc}") /*32*/ #else #define SAVE_CONTEXT_RETURN_LR() \ /* 3*/ ASM("mov r0, %0" :: "r" (_task) : "r0"); \ /* 2*/ ASM("ldr r1, [r0]" ::: "r1"); \ /* 1*/ ASM("mov r2, #0" ::: "r2"); \ /* 3*/ ASM("mrs r3, PRIMASK" ::: "r3"); \ /*10*/ ASM("push {r0-r7, lr}"); \ /* 1*/ ASM("mov r0, r8" ::: "r0"); \ /* 1*/ ASM("mov r1, r9" ::: "r1"); \ /* 1*/ ASM("mov r2, sl" ::: "r2"); \ /* 1*/ ASM("mov r3, fp" ::: "r3"); \ /* 5*/ ASM("push {r0-r3}") /*28*/ #define SAVE_CONTEXT_RETURN_R3() \ /* 2*/ ASM("push {r3}"); \ /* 3*/ ASM("mov r0, %0" :: "r" (_task) : "r0"); \ /* 2*/ ASM("ldr r1, [r0]" ::: "r1"); \ /* 1*/ ASM("mov r2, #0" ::: "r2"); \ /* 3*/ ASM("mrs r3, PRIMASK" ::: "r3"); \ /* 9*/ ASM("push {r0-r7}"); \ /* 1*/ ASM("mov r0, r8" ::: "r0"); \ /* 1*/ ASM("mov r1, r9" ::: "r1"); \ /* 1*/ ASM("mov r2, sl" ::: "r2"); \ /* 1*/ ASM("mov r3, fp" ::: "r3"); \ /* 5*/ ASM("push {r0-r3}") /*29*/ #define LOAD_CONTEXT() \ /* 2*/ ASM("ldr r0, [sp, %0]" :: "I" (offsetof(context_t, _primask)) : "r0"); \ /* 3*/ ASM("msr PRIMASK, r0"); \ /* 5*/ ASM("pop {r0-r3}" ::: "r0", "r1", "r2", "r3"); \ /* 1*/ ASM("mov r8, r0" ::: "r8"); \ /* 1*/ ASM("mov r9, r1" ::: "r9"); \ /* 1*/ ASM("mov sl, r2" ::: "sl"); \ /* 1*/ ASM("mov fp, r3" ::: "fp"); \ /* 9*/ ASM("pop {r0-r7}" ::: "r0", "r1", "r2", "r3", "r4", "r5", "r6", "r7"); \ /* 2*/ ASM("str r1, [r0]"); \ /* 2*/ ASM("pop {pc}") /*27*/ #endif Task::queue_t Task::_queue = {}; Task::task_t *Task::_task[NUMBER_OF_CORES] = {}; static volatile bool sync_wait = false; static uint8_t def_stack[NUMBER_OF_CORES][DEFAULT_STACK_SIZE];// __attribute__((__aligned__(256))); uint32_t Task::cpuid(void) { #if RP2040 return get_core_num(); #else return 0; #endif } size_t Task::taskid(void) { return (size_t)_task[cpuid()]; } void *Task::data(void) { task_t *task = _task[cpuid()]; return task ? task->data : nullptr; } void Task::begin([[maybe_unused]] bool multicore) { #if RP2040 THREAD_UNLOCK(THREAD_LOCK_ID_SYNC); THREAD_UNLOCK(THREAD_LOCK_ID_TASK); Timer.begin(); PCEvent.begin(); if (multicore) { // // disable interrupt // ASM("cpsid i"); // // start core1 // sync_wait = false; multicore_launch_core1(begin1); // // wait for synchronizing // while (!sync_wait) continue; // // set event (wakeup core1) // ASM("sev"); // // start systick // SysTick::begin(); // // enable interrupt // ASM("cpsie i"); } else SysTick::begin(); #endif } void Task::begin1(void) { // // disable interrupt // ASM("cpsid i"); // // clear event // ASM("sev"); ASM("wfe"); // // wait event // sync_wait = true; ASM("wfe"); // // start systick // SysTick::begin(); // // enable interrupt // ASM("cpsie i"); // // dispatch next task // dispatch(); } // // task switching // // Number of cycles from function call to return // // [When compiled for release mode] // // ATSAMD21(48MHz) // 77 cycles (1.604us) // RP2040(125MHz) // 104 cycles (0.832us) // void Task::yield(void) // (3) { // // save context (28/33) // SAVE_CONTEXT_RETURN_LR(); // // thread lock (1/10) // ASM("cpsid i"); THREAD_LOCK(THREAD_LOCK_ID_TASK); // // check head link (6) // context_t *tail, *head = _queue.head; if (head) { // // update task queue (12) // ASM("mov %0, sp" : "=r" (tail)); _queue.tail = _queue.tail->_next = tail; _queue.head = _queue.head->_next; ASM("mov sp, %0" :: "r" (head)); } // // thread unlock (0/8) // THREAD_UNLOCK(THREAD_LOCK_ID_TASK); // // load context (27/32) // LOAD_CONTEXT(); } bool Task::start(void (&func)(void), void *data, size_t size, void *stack) { // // allocate task stack area // task_t *task = (task_t *)stack; if (task == nullptr) { task = (task_t *)malloc(size += sizeof(task_t) + 3); if (task == nullptr) return false; } task->data = data; task->free = stack ? nullptr : task; // // save context // void *sp; context_t *ctx = (context_t *)(((size_t)task + size) & ~3); ASM("mov %0, sp" : "=r" (sp)); ASM("mov sp, %0" :: "r" (ctx)); ASM("push {%0}" :: "r" (func)); ASM("mov r3, %0" :: "r" (invoke) : "r3"); SAVE_CONTEXT_RETURN_R3(); ASM("mov %0, sp" : "=r" (ctx)); ASM("mov sp, %0" :: "r" (sp)); // // set task info // ctx->_task = (reg_t)task; // // append tail link // append(ctx, ctx); return true; } void Task::invoke(void) { // // load task parameter // ASM("pop {r0}"); // // call task method // ASM("blx r0"); // // stop // stop(); } void Task::stop(void) { task_t *task = (task_t *)taskid(); if (task) { // // change internal stack // ASM("mov sp, %0" :: "r" (def_stack[cpuid() + 1])); // // free stack area // if (task->free) free(task->free); // // dispatch next task // dispatch(); } } void Task::dispatch(void) { while (1) { // // thread lock // ASM("cpsid i"); THREAD_LOCK(THREAD_LOCK_ID_TASK); // // check task queue // context_t *ctx = _queue.head; if (ctx) { // // dequeue // if ((_queue.head = ctx->_next) == nullptr) _queue.tail = nullptr; // // thread unlock // THREAD_UNLOCK(THREAD_LOCK_ID_TASK); // // load context // ASM("mov sp, %0" :: "r" (ctx)); LOAD_CONTEXT(); // // Dummy code to avoid compilation errors // return; } // // thread unlock // THREAD_UNLOCK(THREAD_LOCK_ID_TASK); ASM("cpsie i"); // // wait event // ASM("wfe"); ASM("nop"); } } void Task::append(context_t *head, context_t *tail) { DECLARE_CRITICAL; ENTER_CRITICAL(THREAD_LOCK_ID_TASK); *(_queue.tail ? &_queue.tail->_next : &_queue.head) = head; _queue.tail = tail; tail->_next = nullptr; LEAVE_CRITICAL(THREAD_LOCK_ID_TASK); ASM("sev"); } void Task::prepend(context_t *head, context_t *tail) { DECLARE_CRITICAL; ENTER_CRITICAL(THREAD_LOCK_ID_TASK); if ((tail->_next = _queue.head) == nullptr) _queue.tail = tail; _queue.head = head; LEAVE_CRITICAL(THREAD_LOCK_ID_TASK); ASM("sev"); } #if RP2040 void Task::delay(uint32_t us) { uint32_t t = time_us_32(); do yield(); while(time_us_32() - t < us); } void Task::sleep(int64_t us) { Sync sync; sync.sleep(us); } bool Sync::alarm_handler(Alarm& alarm) { ((Sync *)alarm.params(0))->timeout(alarm); return false; } void Sync::timeout(Alarm& alarm) { context_t *ctx = (context_t *)alarm.params(1); uint32_t save = blocking(); for (context_t **p = &_queue.head; *p; p = &(*p)->_next) { if (*p == ctx) { *p = (*p)->_next; if (_queue.head == nullptr) _queue.tail = nullptr; Task::append(ctx, ctx); alarm.params(1, nullptr); break; } } unblocking(save); } int Sync::sleep(int64_t timeout, uint32_t save) { Alarm alarm; return sleep0(alarm.interval(timeout), save); } int Sync::sleep0(Alarm& alarm, uint32_t save) #else int Sync::sleep(uint32_t save) #endif { context *ctx; // // check timeout // #if RP2040 if (alarm.interval() == 0) return SYNC_TIMEOUTED; #endif // // save context // ASM("ldr r3, =9f + 1" ::: "r3"); SAVE_CONTEXT_RETURN_R3(); ASM("mov %0, sp" : "=r" (ctx)); // // blocking // if (save & SYNC_BLOCKED) { save &= ~SYNC_BLOCKED; ctx->_primask = save; } else save = blocking(); // // append tail link // _queue.tail = *(_queue.tail ? &_queue.tail->_next : &_queue.head) = ctx; // // start timer // #if RP2040 alarm.handler(alarm_handler).params(0, this).params(1, ctx); if (alarm.interval() > 0) Timer.start(alarm); #endif // // change internal stack // ASM("mov sp, %0" :: "r" (def_stack[cpuid() + 1])); // // unblocking // unblocking(save); // // dispatch next task // Task::dispatch(); // // execute prologue code // ASM("9:"); #if RP2040 return alarm.params(1) ? SYNC_WAKEUPED : SYNC_TIMEOUTED; #else return SYNC_WAKEUPED; #endif } void Sync::wakeup(bool all, bool prepend) { uint32_t save = blocking(); wakeup0(all, prepend); unblocking(save); } bool Sync::wakeup0(bool all, bool prepend) { context_t *head = _queue.head; if (head) { ++_wakeup; context_t *tail; if (all) { tail = _queue.tail; _queue.head = _queue.tail = nullptr; } else { tail = head; if ((_queue.head = head->_next) == nullptr) _queue.tail = nullptr; } #if RP2040 for (context_t *p = head;; p = p->_next) { Timer.cancel(1, p); if (p == tail) break; } #endif if (prepend) Task::prepend(head, tail); else Task::append(head, tail); return true; } return false; } bool Sync::wakeup0(size_t taskid) { for (context_t **p = &_queue.head; *p; p = &(*p)->_next) { context_t *q = *p; if (q->_task == taskid) { if (((*p = q->_next) == nullptr) && (p == &_queue.head)) _queue.tail = nullptr; Timer.cancel(1, q); Task::append(q, q); return true; } } return false; } size_t Sync::wakeuped(bool confirmed) { size_t rv = _wakeup; if (rv && confirmed) --_wakeup; return rv; } void Sync::lock(void) { THREAD_LOCK(THREAD_LOCK_ID_SYNC); } void Sync::unlock(void) { THREAD_UNLOCK(THREAD_LOCK_ID_SYNC); } uint32_t Sync::blocking(void) { DECLARE_CRITICAL; ENTER_CRITICAL(THREAD_LOCK_ID_SYNC); return __primask__; } void Sync::unblocking(DECLARE_CRITICAL) { LEAVE_CRITICAL(THREAD_LOCK_ID_SYNC); } |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 |
/* systick.h - SysTick Library for Raspberry Pi Pico (RP2040) Copyright (c) 2021 Sasapea's Lab. All right reserved. This library is free software; you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation; either version 2.1 of the License, or (at your option) any later version. This library is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details. You should have received a copy of the GNU Lesser General Public License along with this library; if not, write to the Free Software Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA */ #pragma once #include <stdint.h> #include <stdbool.h> #include "task.h" #define SYSTICK_CLOCK 125 // 125MHz #define SYSTICK_TIME_US 1000 // 1000us #define SYSTICK_RELOAD (SYSTICK_CLOCK * SYSTICK_TIME_US - 1) class SysTick { private: typedef struct { uint32_t counts; uint32_t micros; } overflow_t; static volatile overflow_t _overflow[NUMBER_OF_CORES]; friend void _isr_systick(void); public: static void begin(void); static uint32_t raw(void); static uint32_t micros(void); static uint32_t millis(void); }; |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 |
/* systick.cpp - SysTick Library for Raspberry Pi Pico (RP2040) Copyright (c) 2021 Sasapea's Lab. All right reserved. This library is free software; you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation; either version 2.1 of the License, or (at your option) any later version. This library is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details. You should have received a copy of the GNU Lesser General Public License along with this library; if not, write to the Free Software Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA */ #include <hardware/structs/systick.h> #include <hardware/regs/m0plus.h> #include "systick.h" volatile SysTick::overflow_t SysTick::_overflow[NUMBER_OF_CORES] = {}; inline void _isr_systick(void) { volatile SysTick::overflow_t *ovf = &SysTick::_overflow[Task::cpuid()]; (void)systick_hw->csr; ovf->counts += 1; ovf->micros += SYSTICK_TIME_US; } extern "C" void isr_systick(void) { _isr_systick(); } void SysTick::begin(void) { systick_hw->csr = 0; // disable SysTick *(io_rw_32 *)(&systick_hw->cvr) = M0PLUS_SYST_CVR_CURRENT_RESET; // reset counter to zero. systick_hw->rvr = SYSTICK_RELOAD; systick_hw->csr = M0PLUS_SYST_CSR_ENABLE_BITS | M0PLUS_SYST_CSR_TICKINT_BITS | M0PLUS_SYST_CSR_CLKSOURCE_BITS; } uint32_t SysTick::raw(void) { return systick_hw->cvr; } uint32_t SysTick::micros(void) { uint32_t cvr, cnt; volatile overflow_t *ovf = &_overflow[Task::cpuid()]; while (1) { cnt = ovf->micros; cvr = systick_hw->cvr; if (systick_hw->csr & M0PLUS_SYST_CSR_COUNTFLAG_BITS) { ovf->counts += 1; ovf->micros += SYSTICK_TIME_US; } else if (cnt == ovf->micros) break; } return cnt + (SYSTICK_RELOAD - cvr) / SYSTICK_CLOCK; } uint32_t SysTick::millis(void) { #if (SYSTICK_TIME % 1000 == 0) return _overflow[Task::cpuid()].counts * (SYSTICK_TIME_US / 1000); #else return (uint64_t)_overflow[Task::cpuid()].counts * 1000 / SYSTICK_TIME_US; #endif } |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 |
/* timer.h - Timer Library for Paspberry Pi Pico (RP2040) Copyright (c) 2022 Sasapea's Lab. All right reserved. This library is free software; you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation; either version 2.1 of the License, or (at your option) any later version. This library is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details. You should have received a copy of the GNU Lesser General Public License along with this library; if not, write to the Free Software Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA */ #pragma once #include <stdint.h> #include <stdbool.h> #include <hardware/platform_defs.h> class Alarm; typedef bool (*alarm_handler_t)(Alarm& alarm); class Alarm { protected: Alarm *_next; uint64_t _alarm; int64_t _interval; alarm_handler_t _handler; void *_params[4]; friend class TimerClass; public: Alarm(void); virtual ~Alarm(void); Alarm& interval(int64_t interval, bool fromnow = true); int64_t interval(void); Alarm& handler(alarm_handler_t handler); alarm_handler_t handler(void); Alarm& params(int num, void *val); void *params(int num = 0); }; class TimerClass { protected: int _timer_num; Alarm *_alarm_list; static void timeup0(void); void timeup(void); bool add(Alarm& alarm); void restart(void); inline static uint32_t blocking(void); inline static void unblocking(uint32_t save); public: TimerClass(void); virtual ~TimerClass(void); int begin(int timer_num = -1); void end(void); bool start(Alarm& alarm); void cancel(Alarm& alarm); void cancel(int num, void *arg); }; extern TimerClass Timer; |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 |
/* timer.cpp - Timer Library for Paspberry Pi Pico (RP2040) Copyright (c) 2022 Sasapea's Lab. All right reserved. This library is free software; you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation; either version 2.1 of the License, or (at your option) any later version. This library is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details. You should have received a copy of the GNU Lesser General Public License along with this library; if not, write to the Free Software Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA */ #include <string.h> #include <hardware/irq.h> #include <hardware/structs/timer.h> #include <hardware/timer.h> #include <hardware/sync.h> #include "timer.h" #define SPINLOCK_ID_TIMER PICO_SPINLOCK_ID_TIMER TimerClass Timer; static TimerClass *_instances[NUM_TIMERS]; static irq_handler_t _handlers[NUM_TIMERS]; TimerClass::TimerClass(void) : _timer_num(-1) , _alarm_list(nullptr) { } TimerClass::~TimerClass(void) { end(); } int TimerClass::begin(int timer_num) { if (timer_num < 0) { for (int i = 0; i < NUM_TIMERS; ++i) { if (begin(i) >= 0) return i; } } else if ((timer_num < NUM_TIMERS) && !(timer_hw->inte & (1 << timer_num))) { _timer_num = timer_num; _instances[timer_num] = this; _handlers[timer_num] = irq_get_exclusive_handler(timer_num + TIMER_IRQ_0); irq_set_exclusive_handler(timer_num + TIMER_IRQ_0, timeup0); timer_hw->intr = 1 << timer_num; hw_set_bits(&timer_hw->inte, 1 << timer_num); irq_clear(timer_num + TIMER_IRQ_0); irq_set_enabled(timer_num + TIMER_IRQ_0, true); return timer_num; } return -1; } void TimerClass::end(void) { if (_timer_num >= 0) { timer_hw->armed = 1 << _timer_num; hw_set_bits(&timer_hw->intf, 1 << _timer_num); _alarm_list = nullptr; _timer_num = -1; } } uint32_t TimerClass::blocking(void) { return spin_lock_blocking(spin_lock_instance(SPINLOCK_ID_TIMER)); } void TimerClass::unblocking(uint32_t save) { spin_unlock(spin_lock_instance(SPINLOCK_ID_TIMER), save); } bool TimerClass::start(Alarm& alarm) { if ((_timer_num < 0) || (alarm._interval < 1) || !alarm._handler) return false; uint32_t save = blocking(); if (add(alarm)) restart(); unblocking(save); return true; } void TimerClass::cancel(Alarm& alarm) { uint32_t save = blocking(); for (Alarm **p = &_alarm_list; *p; p = &(*p)->_next) { if (*p == &alarm) { *p = (*p)->_next; break; } } unblocking(save); } void TimerClass::cancel(int num, void *arg) { if ((num < (sizeof(Alarm::_params) / sizeof(Alarm::_params[0]))) && arg) { uint32_t save = blocking(); for (Alarm **p = &_alarm_list; *p; p = &(*p)->_next) { if ((*p)->_params[num] == arg) { *p = (*p)->_next; break; } } unblocking(save); } } bool TimerClass::add(Alarm& alarm) { Alarm **p; for (p = &_alarm_list; *p && ((int64_t)((*p)->_alarm - alarm._alarm) <= 0); p = &(*p)->_next) continue; alarm._next = *p; *p = &alarm; return p == &_alarm_list; } void TimerClass::timeup0(void) { uint32_t timer_num; __asm volatile ("mrs %0, ipsr" : "=r" (timer_num)); timer_num = (timer_num & 0x3F) - 16 - TIMER_IRQ_0; timer_hw->intr = 1 << timer_num; if (timer_hw->intf & (1 << timer_num)) { hw_clear_bits(&timer_hw->intf, 1 << timer_num); hw_clear_bits(&timer_hw->inte, 1 << timer_num); irq_set_enabled(timer_num + TIMER_IRQ_0, false); irq_set_exclusive_handler(timer_num + TIMER_IRQ_0, _handlers[timer_num]); _instances[timer_num] = nullptr; } else _instances[timer_num]->timeup(); } void TimerClass::timeup(void) { Alarm *p = nullptr; spin_lock_unsafe_blocking(spin_lock_instance(SPINLOCK_ID_TIMER)); while (_alarm_list) { if ((p == _alarm_list) || ((int64_t)(_alarm_list->_alarm - time_us_64()) > 0)) { restart(); break; } _alarm_list = (p = _alarm_list)->_next; spin_unlock_unsafe(spin_lock_instance(SPINLOCK_ID_TIMER)); bool repeat = p->_handler(*p); spin_lock_unsafe_blocking(spin_lock_instance(SPINLOCK_ID_TIMER)); if (repeat) { p->_alarm += p->_interval; if (!add(*p)) p = nullptr; } else p = nullptr; } spin_unlock_unsafe(spin_lock_instance(SPINLOCK_ID_TIMER)); } void TimerClass::restart(void) { uint32_t n; uint64_t t = time_us_64(); uint64_t d = _alarm_list->_alarm - t; if ((int64_t)d <= 1) n = (uint32_t)t + 2; else if (d >> 32) n = (uint32_t)t + 0x80000000; else n = (uint32_t)t + (uint32_t)d; timer_hw->armed = 1 << _timer_num; timer_hw->intr = 1 << _timer_num; timer_hw->alarm[_timer_num] = n; } Alarm::Alarm(void) { } Alarm::~Alarm(void) { } Alarm& Alarm::interval(int64_t interval, bool fromnow) { if (fromnow) _alarm = time_us_64() + interval; _interval = interval; return *this; } int64_t Alarm::interval(void) { return _interval; } Alarm& Alarm::handler(alarm_handler_t handler) { _handler = handler; return *this; } alarm_handler_t Alarm::handler(void) { return _handler; } Alarm& Alarm::params(int num, void *val) { if (num < (sizeof(_params) / sizeof(_params[0]))) _params[num] = val; return *this; } void *Alarm::params(int num) { return num < (sizeof(_params) / sizeof(_params[0])) ? _params[num] : nullptr; } |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 |
/* pcevent.h - Pin Change Event Library for Raspberry Pi Pico (RP2040) Copyright (c) 2022 Sasapea's Lab. All right reserved. This library is free software; you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation; either version 2.1 of the License, or (at your option) any later version. This library is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details. You should have received a copy of the GNU Lesser General Public License along with this library; if not, write to the Free Software Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA */ #pragma once #include <stdint.h> #include <stdbool.h> #include "hardware/gpio.h" #include "task.h" typedef enum { PCEVENT_DISABLE = 0, PCEVENT_LEVEL_LOW = GPIO_IRQ_LEVEL_LOW, PCEVENT_LEVEL_HIGH = GPIO_IRQ_LEVEL_HIGH, PCEVENT_EDGE_FALL = GPIO_IRQ_EDGE_FALL, PCEVENT_EDGE_RISE = GPIO_IRQ_EDGE_RISE, PCEVENT_EDGE_BOTH = GPIO_IRQ_EDGE_FALL | GPIO_IRQ_EDGE_RISE, } PCEVENT_LEVEL; class PCEventClass : protected Sync { public: PCEventClass(void) {} virtual ~PCEventClass(void) {} static void begin(void); static void end(void); static void interrupt(uint32_t pin, PCEVENT_LEVEL level, gpio_irq_callback_t handler = nullptr); int wait(uint32_t pin, PCEVENT_LEVEL level, int64_t timeout = -1); static uint32_t edge(uint32_t pin); protected: void wakeup(uint32_t pin, uint32_t events); static void enableInt(uint32_t pin); private: static void event(void); static void end0(void); }; extern PCEventClass PCEvent; |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 |
/* pcevent.cpp - Pin Change Event Library for Raspberry Pi Pico (RP2040) Copyright (c) 2022 Sasapea's Lab. All right reserved. This library is free software; you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation; either version 2.1 of the License, or (at your option) any later version. This library is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details. You should have received a copy of the GNU Lesser General Public License along with this library; if not, write to the Free Software Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA */ #include <string.h> #include <hardware/irq.h> #include <hardware/sync.h> #include <hardware/timer.h> #include <hardware/structs/iobank0.h> #include "pcevent.h" #define lengthof(a) (sizeof(a) / sizeof(a[0])) typedef struct pcwait { struct pcwait *next; size_t level; size_t taskid; } pcwait_t; typedef struct { pcwait_t *head; pcwait_t *tail; } pcqueue_t; typedef struct { uint32_t edge; size_t inte_wait; size_t inte_callback; gpio_irq_callback_t handler; } pcevent_t; static io_irq_ctrl_hw_t *_irqctrl; static irq_handler_t _default; static pcevent_t _pcevent[NUM_BANK0_GPIOS]; static pcqueue_t _pcqueue; PCEventClass PCEvent; void PCEventClass::begin(void) { memset(_pcevent, 0, sizeof(_pcevent)); _irqctrl = get_core_num() ? &iobank0_hw->proc1_irq_ctrl : &iobank0_hw->proc0_irq_ctrl; for (size_t i = 0; i < lengthof(iobank0_hw->intr); ++i) { iobank0_hw->proc0_irq_ctrl.inte[i] = 0; iobank0_hw->proc1_irq_ctrl.inte[i] = 0; iobank0_hw->intr[i] = (io_rw_32)-1; } _default = irq_get_exclusive_handler(IO_IRQ_BANK0); irq_set_exclusive_handler(IO_IRQ_BANK0, event); irq_clear(IO_IRQ_BANK0); irq_set_enabled(IO_IRQ_BANK0, true); } void PCEventClass::end(void) { if (_irqctrl) _irqctrl->intf[0] = 1; } void PCEventClass::end0(void) { for (size_t i = 0; i < lengthof(iobank0_hw->intr); ++i) { _irqctrl->intf[i] = 0; _irqctrl->inte[i] = 0; iobank0_hw->intr[i] = (io_rw_32)-1; } irq_set_enabled(IO_IRQ_BANK0, false); irq_set_exclusive_handler(IO_IRQ_BANK0, _default); _irqctrl = nullptr; } void PCEventClass::enableInt(uint32_t pin) { size_t bpos = (pin & 7) << 2; size_t inte = _pcevent[pin].inte_wait | _pcevent[pin].inte_callback; io_rw_32 *inte_reg = &_irqctrl->inte[pin >> 3]; hw_clear_bits(inte_reg, (~inte & 0x0F) << bpos); hw_set_bits(inte_reg, inte << bpos); } void PCEventClass::interrupt(uint32_t pin, PCEVENT_LEVEL level, gpio_irq_callback_t handler) { if (pin < lengthof(_pcevent)) { pcevent_t& pcevent = _pcevent[pin]; pcevent.inte_callback = level; pcevent.handler = handler; enableInt(pin); } } int PCEventClass::wait(uint32_t pin, PCEVENT_LEVEL level, int64_t timeout) { int rv = SYNC_TIMEOUTED; if ((pin < lengthof(_pcevent)) && level) { if (level & PCEVENT_LEVEL_HIGH) { if (gpio_get(pin)) return SYNC_WAKEUPED; level = (PCEVENT_LEVEL)(level | PCEVENT_EDGE_RISE); } if (level & PCEVENT_LEVEL_LOW) { if (!gpio_get(pin)) return SYNC_WAKEUPED; level = (PCEVENT_LEVEL)(level | PCEVENT_EDGE_FALL); } if (timeout) { uint32_t save = blocking(); pcwait_t wait = {nullptr, (size_t)(level & PCEVENT_EDGE_BOTH), Task::taskid()}; _pcqueue.tail = *(_pcqueue.tail ? &_pcqueue.tail->next : &_pcqueue.head) = &wait; _pcevent[pin].inte_wait |= level; enableInt(pin); rv = sleep(timeout, SYNC_BLOCKED | save); if (rv == SYNC_TIMEOUTED) { blocking(); for (pcwait_t **p = &_pcqueue.head; *p; p = &(*p)->next) { if (*p == &wait) { if (((*p = (*p)->next) == nullptr) && (p == &_pcqueue.head)) _pcqueue.tail = nullptr; break; } } unblocking(save); } } } return rv; } uint32_t PCEventClass::edge(uint32_t pin) { return _pcevent[pin].edge; } void PCEventClass::wakeup(uint32_t pin, uint32_t events) { pcevent_t& pcevent = _pcevent[pin]; lock(); if (pcevent.inte_wait & events) { pcevent.inte_wait &= ~events; enableInt(pin); for (pcwait_t **p = &_pcqueue.head; *p; ) { pcwait_t *q = *p; if (q->level & events) { if (((*p = q->next) == nullptr) && (p == &_pcqueue.head)) _pcqueue.tail = nullptr; wakeup0(q->taskid); } else p = &q->next; } } unlock(); } void PCEventClass::event(void) { io_ro_32 *intf_reg = _irqctrl->intf; io_ro_32 *ints_reg = _irqctrl->ints; io_rw_32 *intr_reg = iobank0_hw->intr; for (size_t i = 0; i < lengthof(_irqctrl->ints); ++i) { if (*intf_reg++) { end0(); break; } io_rw_32 ints = *ints_reg++; *intr_reg++ = ints; for (uint32_t pin = i << 3; ints && (pin < lengthof(_pcevent)); ++pin) { uint32_t events = ints & 0x0F; ints >>= 4; if (events) { pcevent_t& pcevent = _pcevent[pin]; if (events & PCEVENT_EDGE_BOTH) pcevent.edge = time_us_32(); PCEvent.wakeup(pin, events); if (pcevent.inte_callback & events) { gpio_irq_callback_t cb = pcevent.handler; if (cb) cb(pin, events); } } } } } |